Speed control
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.7 - 9
7
7.7.3 PT1outputlter
A PT1 low pass lter is series-connected to the speed controller.
Picture 7.7.3 PT1 output lter
PT1
Low pass lter
Speed controller
cS. 29
cS.06...cS.12
active current
setpoint
High frequency oscillations (caused by spring elements in the mechanics of the drive train) can be ltered by
this way from the active current setpoint signal.
The lter time must be adjusted in parameter cS.29 „act. curr. ref. PT1-time“ (cS.29). A longer lter time causes
a stronger smoothing of the active current signal, but also less dynamic control characteristic and increased
oscillation inclination.
An adaptation of the speed controller is required on changing the Pt1-time. This lter is used e.g. for spindles
in order to avoid jumps in the current setpoint at fast load changes.
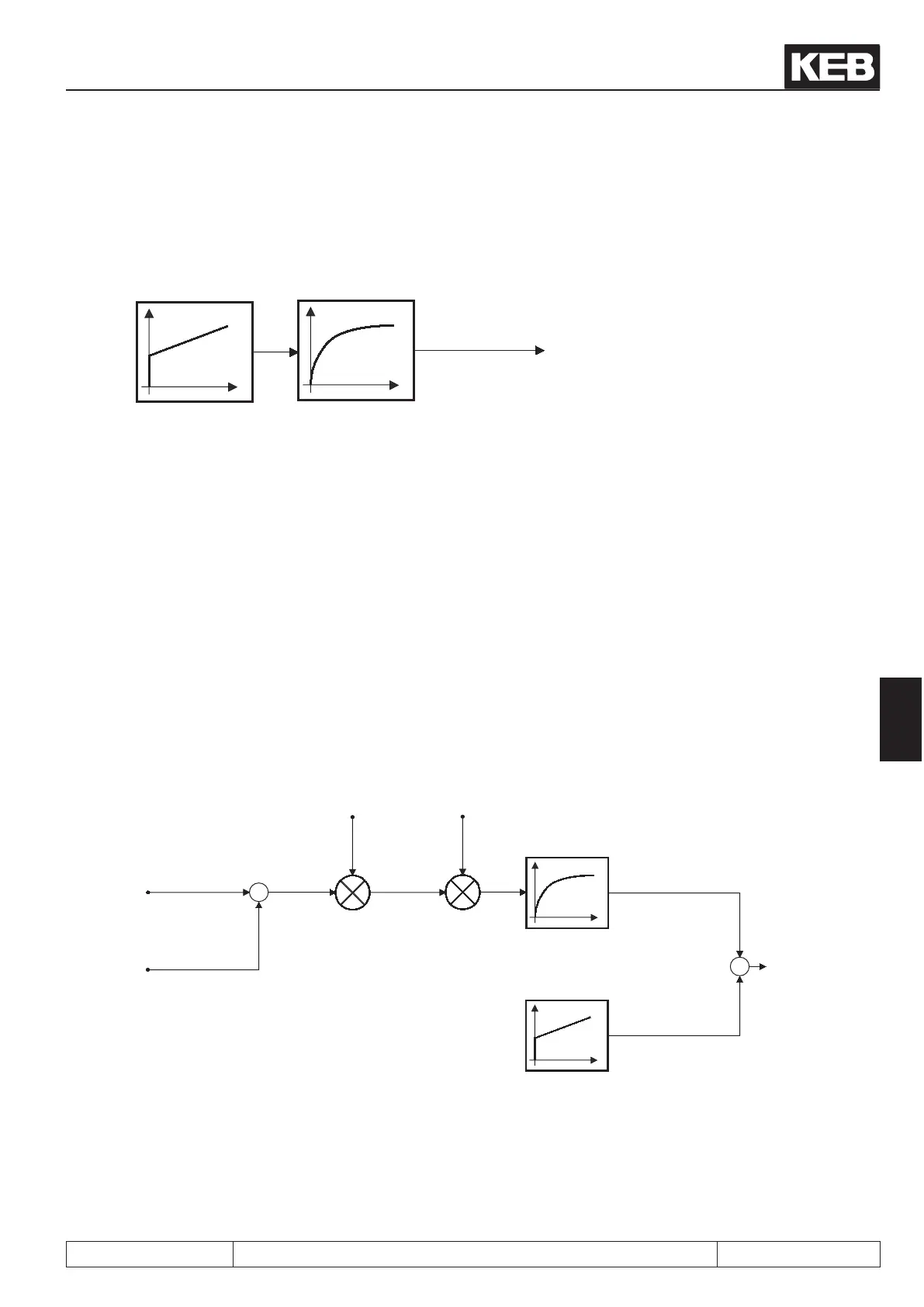
7.7.4 Acceleration dependent pre-control
If the mass moment of inertia of a drive is known it can be calculated which torque is required to accelerate the
drive. This function is activated, if a value unequal 0 is entered in parameter cS.28 „pretorq. speed fact.%/". This
parameter must be set to 100% for a complete pre-control.
Picture 7.7.4 Acceleration dependent pre-control
Inertia cS.25
pretorque speed
fact. % cS.28
pretorq. speed PT1-
time cS.27
Speed controller
Low pass lter
actual speed set-
point value
Speed setpoint
value before 1 ms
precontrol
acceleration torque
delta n_set
+
-
+
+
PT1

 Loading...
Loading...

