7.12.6 Position controller
The position controller is constructed as P controller. The increments per revolution of the encoder and the
resolution of the speed is considered in the controller. The speed controller setting can be assumed when ex-
changing the encoder (e.g., from 1024 => 2500 increments) or changing the speed range (e.g., from the 4000
to the 8000 speed mode by changing the parameter ud.02 "control type").
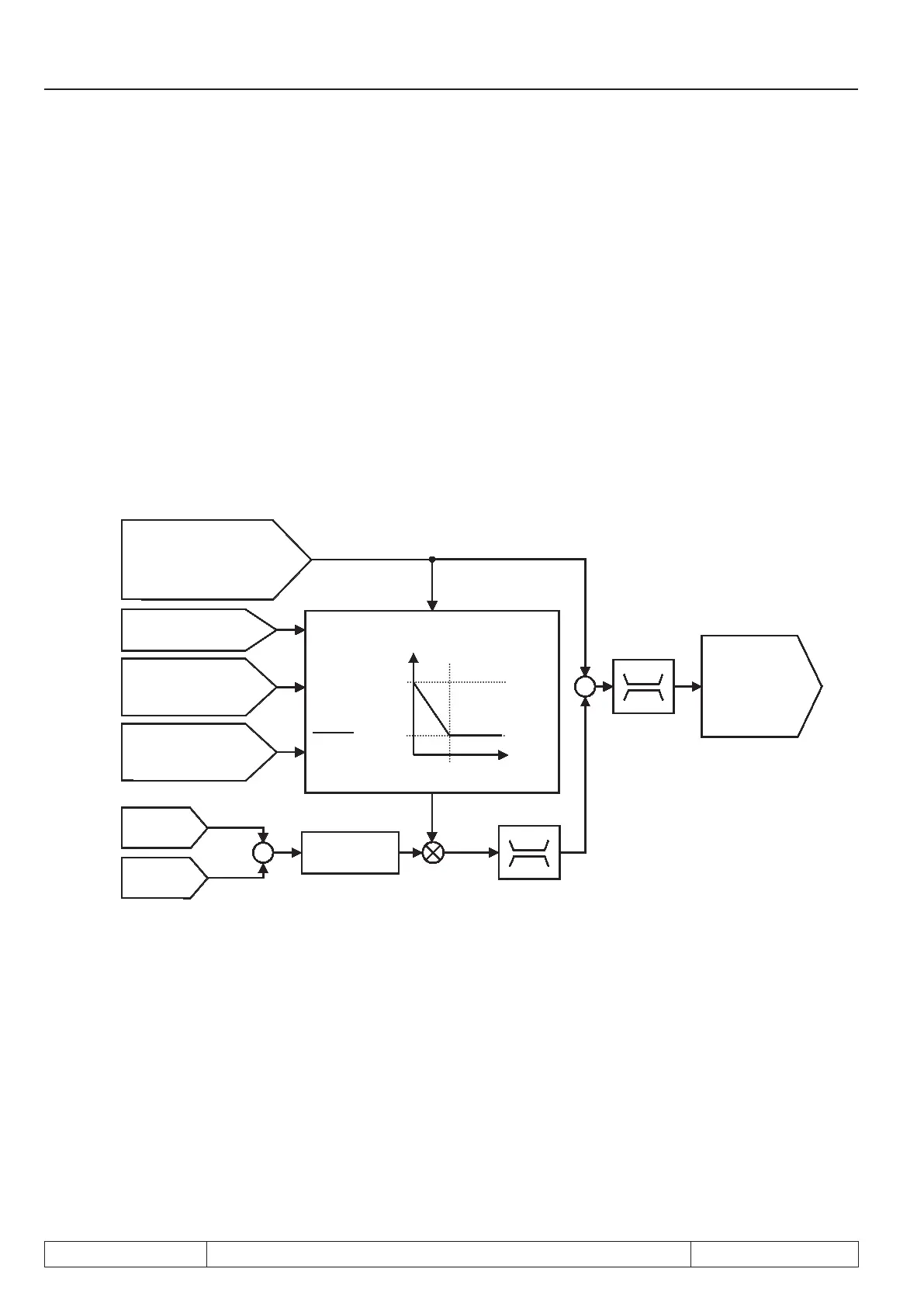
The Kp of the position controller can be changed speed-dependently. Thereby, one can, e.g., choose a
very hard setting for the load transfer and the approach to the final position. For the remaining positioning,
the Kp is lowered then to achieve a smooth running of the drive and to dampen the effects of mechanical distur-
bances (e.g. welds in the linear rails or similar).
The base value of the controller is set in PS.06 "KP for positioning / synchronous". Parameter PS.08 "limit
speed for PS.07" determines the limit for speed reduction and parameter PS.07 "KP speed limit reduction"
determines the percentage value the Kp shall still have in relation to its base value at the speed PS.08.
The following figure illustrates this structure:
+
+
+
-
positioning module:
ru.63 Prole speed
Synchronous module:
ru.10 Encoder 2 speed
PS.06
Kp pos/syn
PS.07
Kp lowering at
Speed limit
PS.08
Speed limit
for PS.07
ru.56
Set position
ru.54
actual position
ru.58
Angle difference
KP
PS.09
pos
pos/syn-position limit
ru.02
display
output display
(setpoint speed for
speed controller)
oP.14 / oP.15
absolute max.
setpoint
Kp position controller
PS.06
Speed
PS.08
PS.07
100 %
* PS.06
Page 7.12 - 82 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating

 Loading...
Loading...

