7.12.4.20 Backlash
This parameter is used to compensate a possibly available backlash. Each positioning is approached with the
gearless adjusted preferred direction. If the positioning is started against this preferred direction, the target po-
sition is initially overdriven by the gearless. After this the positioning occurs in the target position with preferred
direction.
PS.55 Backlash
Default value 0: off
Upper limit 1073741824 inc.
Lower limit -1073741824 inc.
7.12.4.21 Position scan
With parameter PS.37 "pos. scan index inp. sel." or via the digital input function (di.24...di.35) "scan position",
an input can be defined for scanning the actual position (ru.54) with its positive edge.
The position scan occurs only in status "positioning active". The scanned actual position value (ru.54) is displa-
yed in parameter ru.71 "teach/ scan position display". Each additional edge overwrites the old scan position.
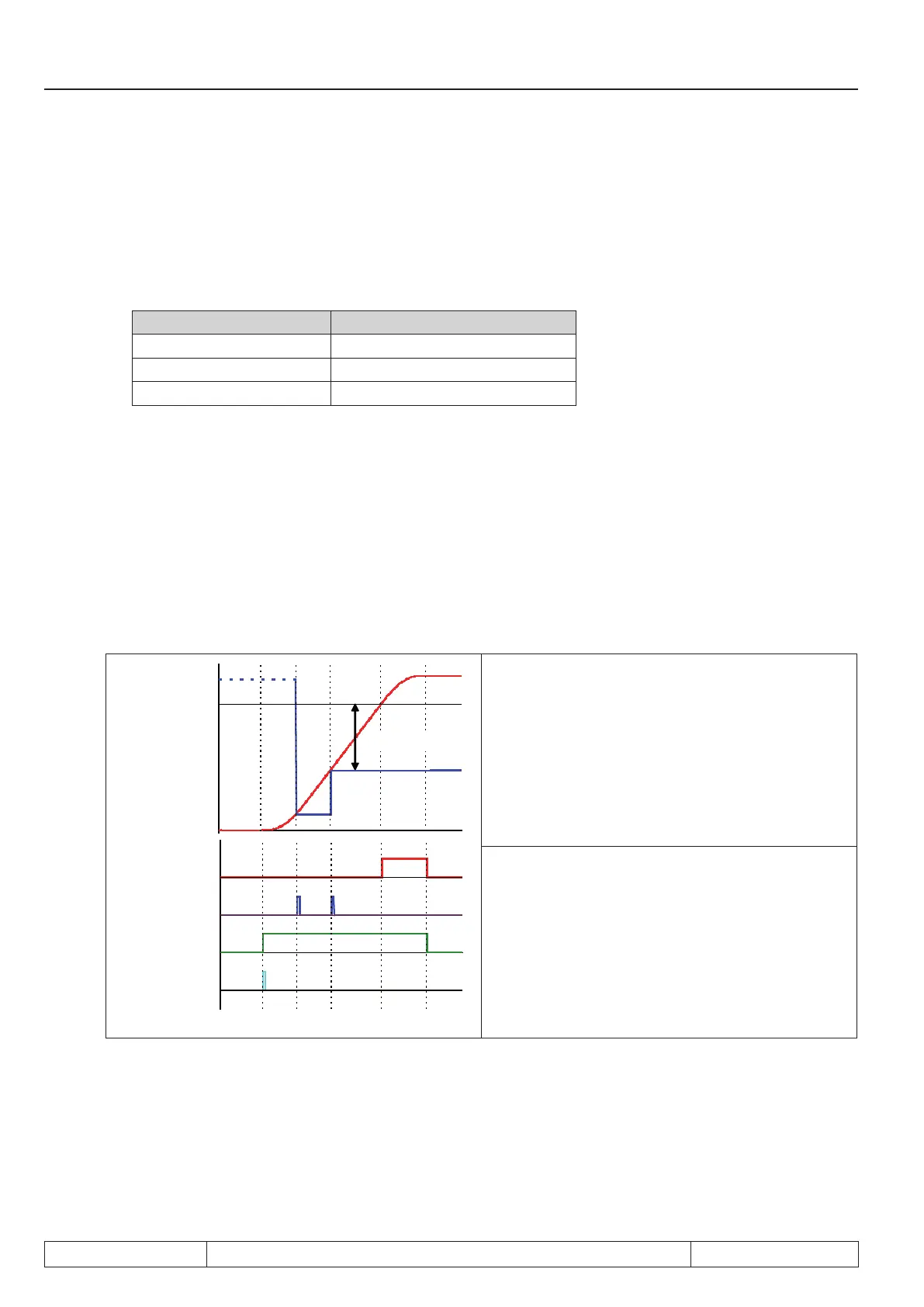
A digital output can be set dependent on the scanned position. Switching condition „75: amount actual position-
scan position > level“ must be selected for this.
Switching level 0
Switching condition
0
Scan position
positioning active
Start positioning
ru.54: actual position
ru.71: teach / scan
position display
The output function "switching condition 0" is reset
by:
● Setting of a new target position
● Reaching of the target position
● The target position is not reachable
● Leaving the posi mode
Note:
As long as the switching condition remains set, the
teach-function (see chapter 7.12.4.21) cannot be
used.
7.12.4.22 Teach function
With parameter PS.36 "teach index input selection", or via the digital input function (di.24...di.35) "store position
(teach)", an input can be defined for scanning the actual position (ru.54) with the positive edge.
The scanned value is displayed in parameter ru.71 "teach / scan position display" and stored in PS.24 as the
target position. Parameter PS.35 "teaching mode" determines which positioning block (which index) the target
position is stored in.
Page 7.12 - 72 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating

 Loading...
Loading...

