PS.35: Teach mode
Value Explanation
0: Write index PS.23
The actual position is written in the positioning block selected by para-
meter PS.23 „index/selection“.
1: Write index PS.23 incr.+1
The current position is written in the positioning block selected by para-
meter PS.23 "index/selection" and then PS.23 is increased by 1 (limited
to maximum index 31).
2: Write index PS.28
The current position is written in the positioning block selected by para-
meter PS.28 "start index new profil". Since PS.28 is set-programmable,
positions can be linked with sets this way.
3: Write index PS.58 The current position of PS.59 is written in the index of PS.58.
4: Write index PS.58 incr.+1
The current position of PS.59 is written into the index of PS.58. Then the
position index is increased by 1.
5: Write index PS.56 The selection of the index is determined by the source of PS.56.
Example: Teaching of target position
An undercarriage shall "learn" the position values belonging to a storage location (the position values shall
be teached). In inching mode, the drive is brought to the position that is to be used later as the target of the
positioning (i.e., the storage location in a shelf). The drive is in speed-controlled mode, i.e., the input activating
the posi mode is not set.
Since several storage locations are to be taught consecutively, the setting is PS.35 "teaching mode" = 1. If the
correct position is reached, it is registered as the target position by the teach-pulse. After that, the next storage
location is approached.
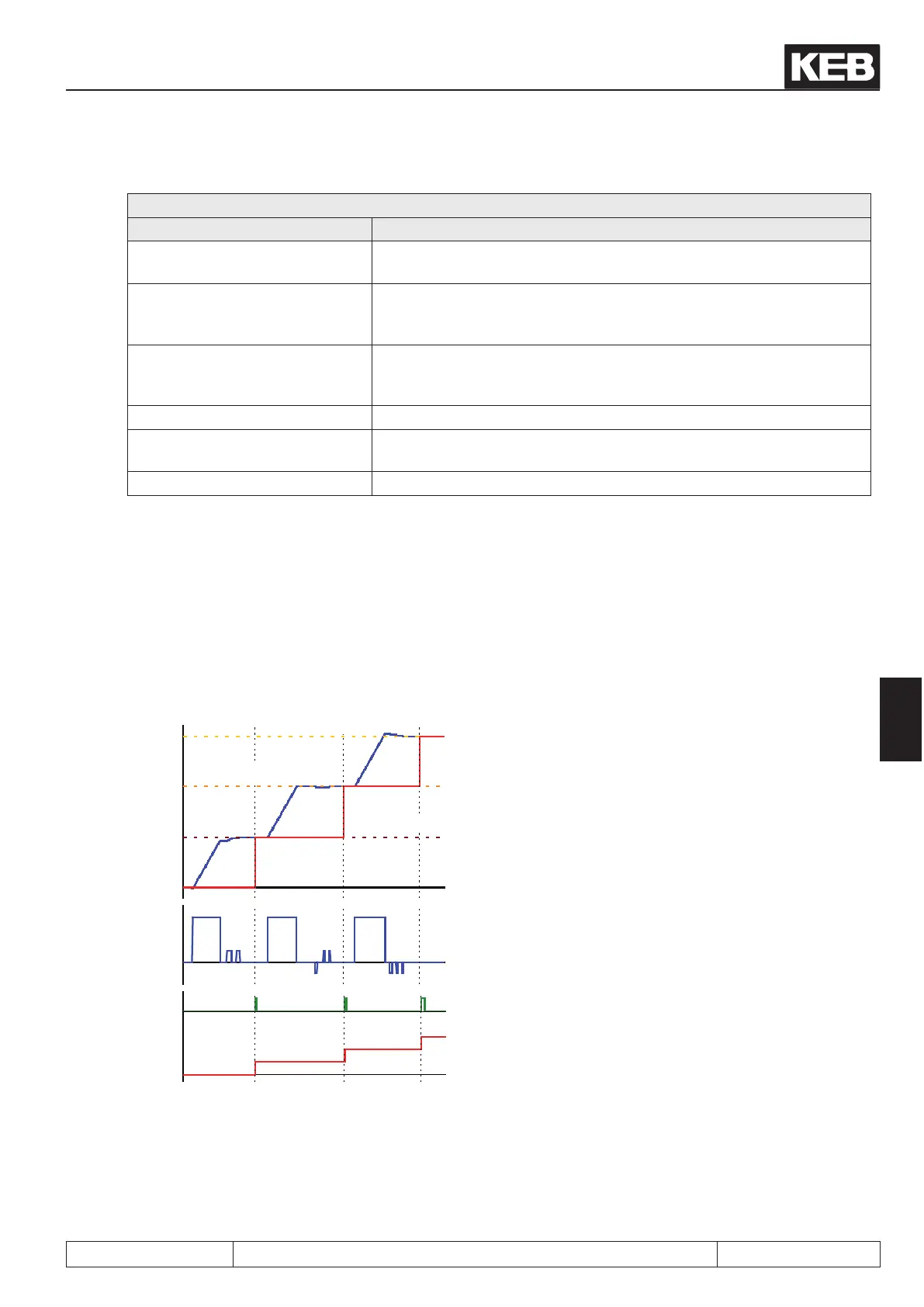
The following figure illustrates the example:
PS.24 Index 1
PS.24 Index 2
PS.24 Index 0
ru.54: actual position
PS.24: index / position
ru.02: ramp
output display
Teach pulse
PS.23: index /
selection
With the digital inputs, 3 constants are selected:
● higher speed for coarse target approach constant
1 = 300 U/min
● inching mode for exact target approach
Fixed value 2 = 50 rpm
Fixed value 3 = -50 rpm
The desired position is approached in vector controlled
operation.
With a teach-pulse (positive edge of the chosen digital
input), the current actual position is registered as the
target position of a positioning block.
The process starts with the index currently selected in
PS.23. Thereafter, the index is increased after every
target position acquisition.
Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 73
7

 Loading...
Loading...

