Motor data and controller adjustments of the asynchronous motor
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.5 - 15
7
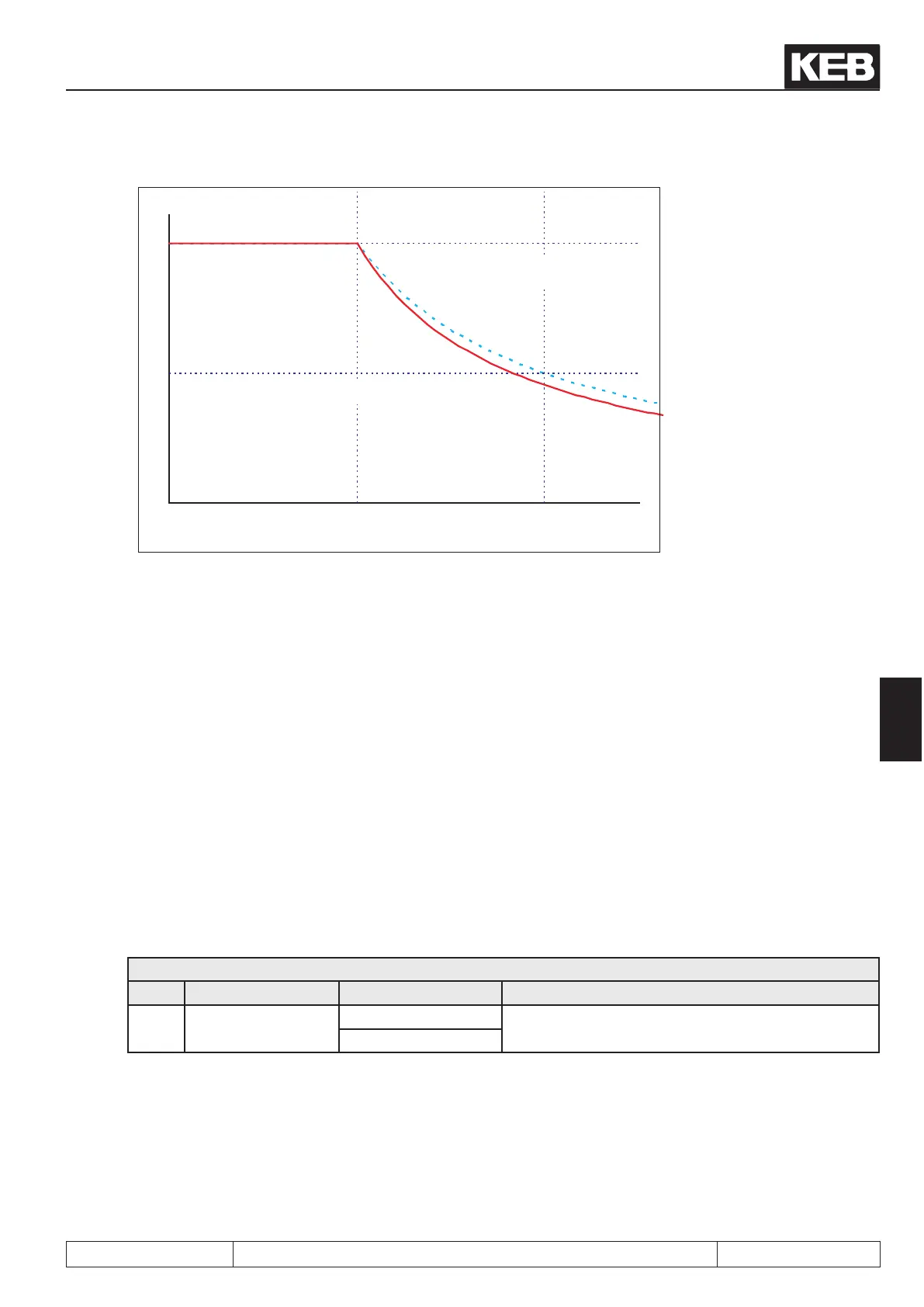
Istfrequenz [U/min]
Motorfluss
Faktor Feldschwächung = 1,2
dr.1
* dr.18
0,5
1
Faktor Feldschwächung (dr.20) = 1
=> 1 / x Flussabsenkung
For an optimum motor adaption, this factor may have to be modied .
The ux reduction is well parametrised, if for every operating point a voltage reserve of approx. 3...10% is
available. I.e., the modulation factor (ru.42) should be (dr.18) ca. 90...97% under nominal load at the eld wea-
kening speed.
7.5.2.2.3 Magnetisation current adaption
For large motors, the automatic calculation of the magnetising current occasionally returns values that are too
large. This value can be reduced by adjusting the parameter "factor ux adaption" (dr.19).
Whether the automatically calculated magnetising current is too large, can be tested by accelerating the drive
to the eld weakening speed (dr.18) in speed-controlled operation with no load. At this speed, the average va-
lue of the modulation factor should not exceed 90%. If this value is exceeded, the factor "factor ux adaption"
(dr.19) should be reduced.
7.5.2.3 Vector controlled operation with motor model (with encoder feedback)
The vector controlled operation with motor model is possible only if the electrical characteristic data of a motor
are known. For this operating mode, the motor model calculation must be activated in parameter dS.04.
dS.04 Flux/rotor adaption mode
Bit Meaning Value Explanation
0 Motor model (ASM)
0: off
Activation of the motor model calculation
1: on
7.5.2.3.1 Electrical parameters (equivalent circuit data) of the motor
The electrical characteristic data of the motor must be known for vector controlled operation with motor model.
The parameters DASM stator resistance (dr.06), DASM leakage inductance (dr.07) and DASM rotor resistance
(dr.08) can be taken from a motor data sheet or they can be automatically determined by the KEB COMBIVERT
using the motor identication. For motors with high power, the resistances are very small (a few mΩ). This can
lead to error in the automatically identication. For these motor, it may be sensible to use the value from the

 Loading...
Loading...

