Motor data and controller adjustments of the asynchronous motor
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.5 - 17
7
7.5.2.3.1.2 Automatic mode
Use generally the automatic mode for the identication of the parameters.
Automatic mode is the most simple method of parameter identication.
Measurement of the dead time compensation characteristics, as well as the stator- and rotor resistance and
the leakage inductance is done in standstill. A small rotation of the motor caused by the test signals is possi-
ble.
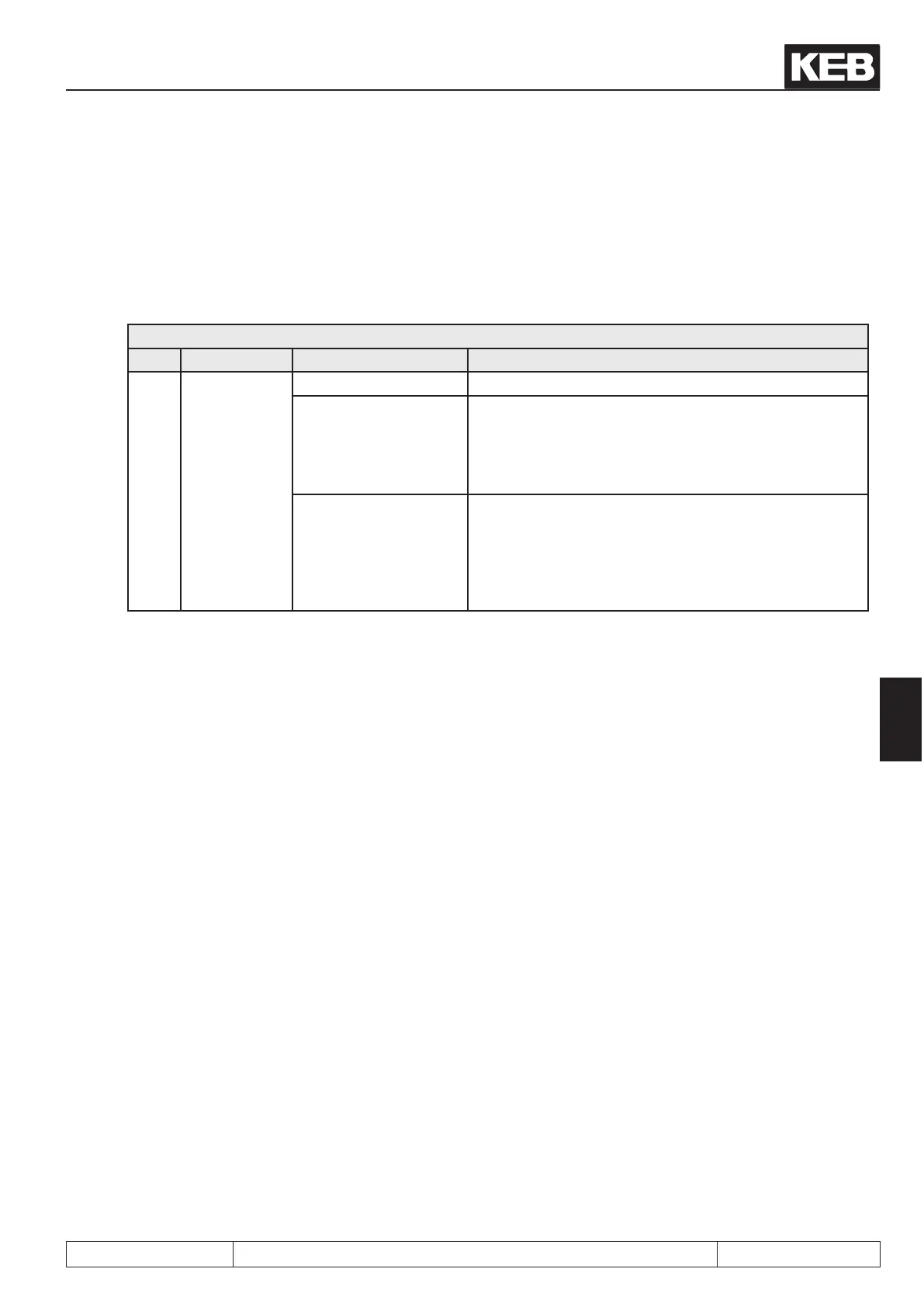
dr.48motoridentication
Bit Description Value Function
0...4 Measurement
0: off
7: Auto ident. without
main inductance (ASM)
/ EMC (SM) !without
rotation!
automatic measurement of the dead time characteristic
and of all equivalent circuit data - with the exception of
the main inductance. This measurement is carried out
with the motor stopped, but a rotation of the motor due to
the test signals is possible.
8: complete AutoIdenti-
cation !with rotation!
!Attention: Requires motor revolution in no-load ope-
ration!
automatic measurement of the dead time characteri-
stic and of all equivalent circuit data - including main in-
ductance.
The motor accelerates to "speed for Mmax" (dr.17)
It is necessary for the identication of the main inductance, that the motor accelerates to the speed for maxi-
mum torque (dr.17) and then it operates in no-load operation.
There is a special ramp "motor identication ramp time" (dr.49) for identication.
This ramp applies during calibration of the main inductance for the acceleration to dr.17 and the deceleration
at the end of the identication.
The speed controller must be parameterised reasonable (select small Ki), the drive may not vibrate during
the identication.
The following chapter, "single identication", contains more detailed information with respect to the separate
steps of the identication and can be skipped if automatic mode is chosen. In the chapter after the next, "ad-
ditional trimmings", two further identications are described which are not part of the automatic mode and that
are unnecessary in many cases.
The explanations of the parameters required to be set continues in chapter 7.5.2.3.3 "generally required set-
tings for operation with motor model".

 Loading...
Loading...

