Motor data and controller adjustments of the asynchronous motor
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.5 - 19
7
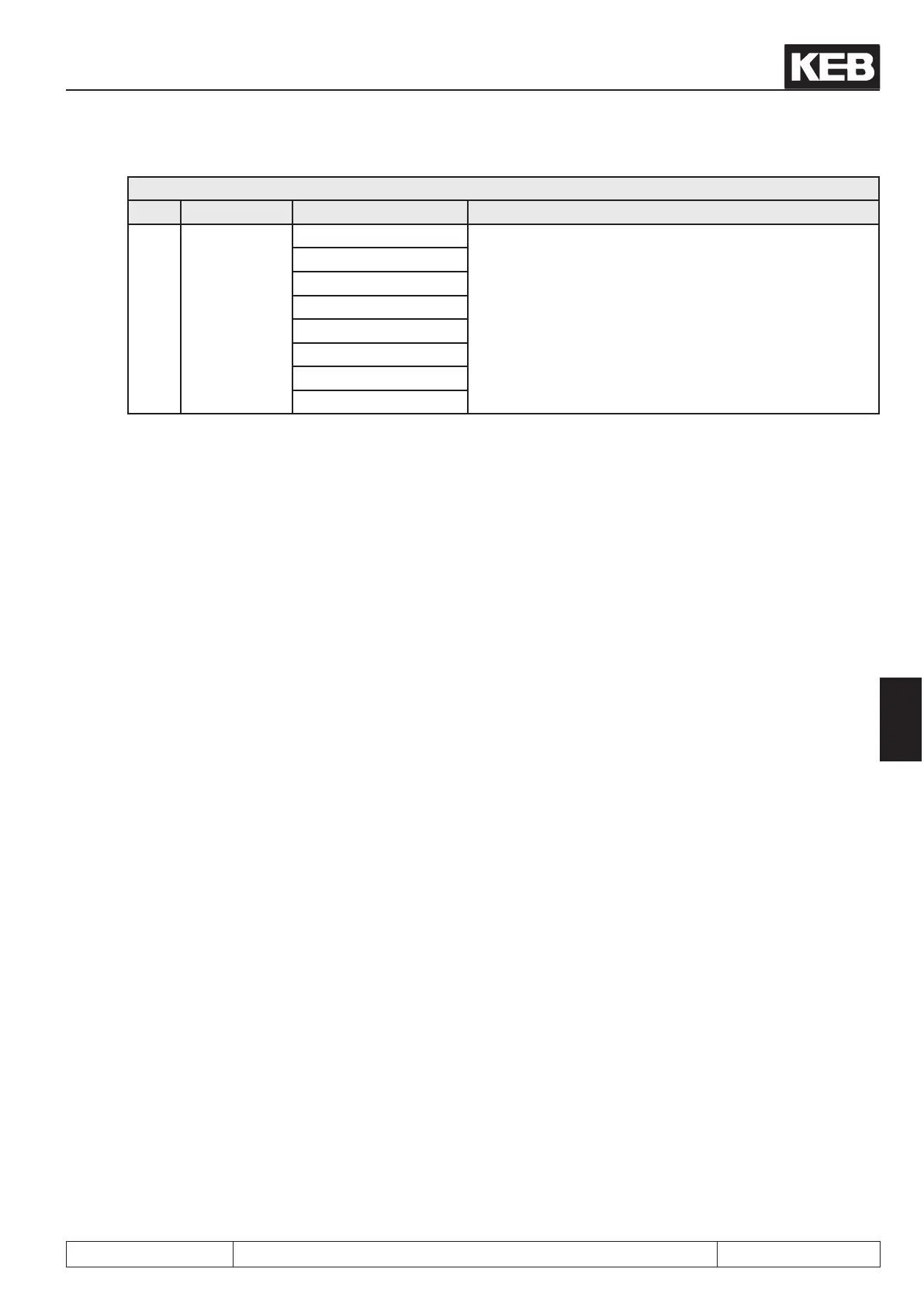
dr.48motoridentication
Bit Description Value Function
5...7 Frequency
0: 1000Hz
The measuring frequency is changed independently duri-
ng measurement.
Therefore, leave the value at 0: 1000Hz !
Only changeable for test and diagnostics purposes.
32: 500Hz
64: 250Hz
96: 125Hz
128: 62,5Hz
160: 32,25Hz
192: 15,625Hz
224: 7,8125Hz
* at dr.48 = 8 auto-identication
Pre-adjustment of the main inductance (dr.48 = 1)
With dr.48 = 1 (calculation of the main inductance (ASM) / EMC(SM)), a starting value for the main inductance
is calculated from the rating plate data.
Leakage inductance measurement (dr.48 = 2)
Measurement of the leakage inductance (dr.07) occurs at standstill with a test signal. The frequency of the
measuring signal is adjustable via bit 5...7 in parameter dr.48.
Since the inverter determines automatically the ideal measuring frequency, value 0 should be always selected
for bits 5... 7.
Stator resistance measurement (dr.48 = 3)
Measurement of the stator resistance is done with DC current.
Rotor resistance measurement (dr.48 = 4)
Measurement of the rotor resistance (dr.08) occurs at standstill with a test signal. The frequency of the measu-
ring signal is adjustable via bit 5...7 in parameter dr.48.
Since the inverter determines automatically the ideal measuring frequency, value 0 should be always selected
for bits 5... 7.
Since the measurement frequency occasionally has to be reduced to 7.8125 Hz for better measurement accu-
racy, the motor may rotate.
Model / controller parameterization (dr.48 = 5)
With dr.48 = 5, the internal model parameters as well as current-, ux- and speed calculation controller parame-
ters are calculated from the equivalent circuit data. If a mode other than automatic is used for the identication,
this action should be executed after the measurement of the leakage inductance, rotor and stator resistance,
but before the identication of the main inductance, in order that the controllers are correctly parametrised for
the speed ramp-up.

 Loading...
Loading...

