Page 7.11 - 12 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Speed measurement
Time for speed calc. (Ec.03, Ec.13)
This parameter denes the time over which the speed average value is determined. Thereby the resolution of
the speed measurement is dened simultaneously:
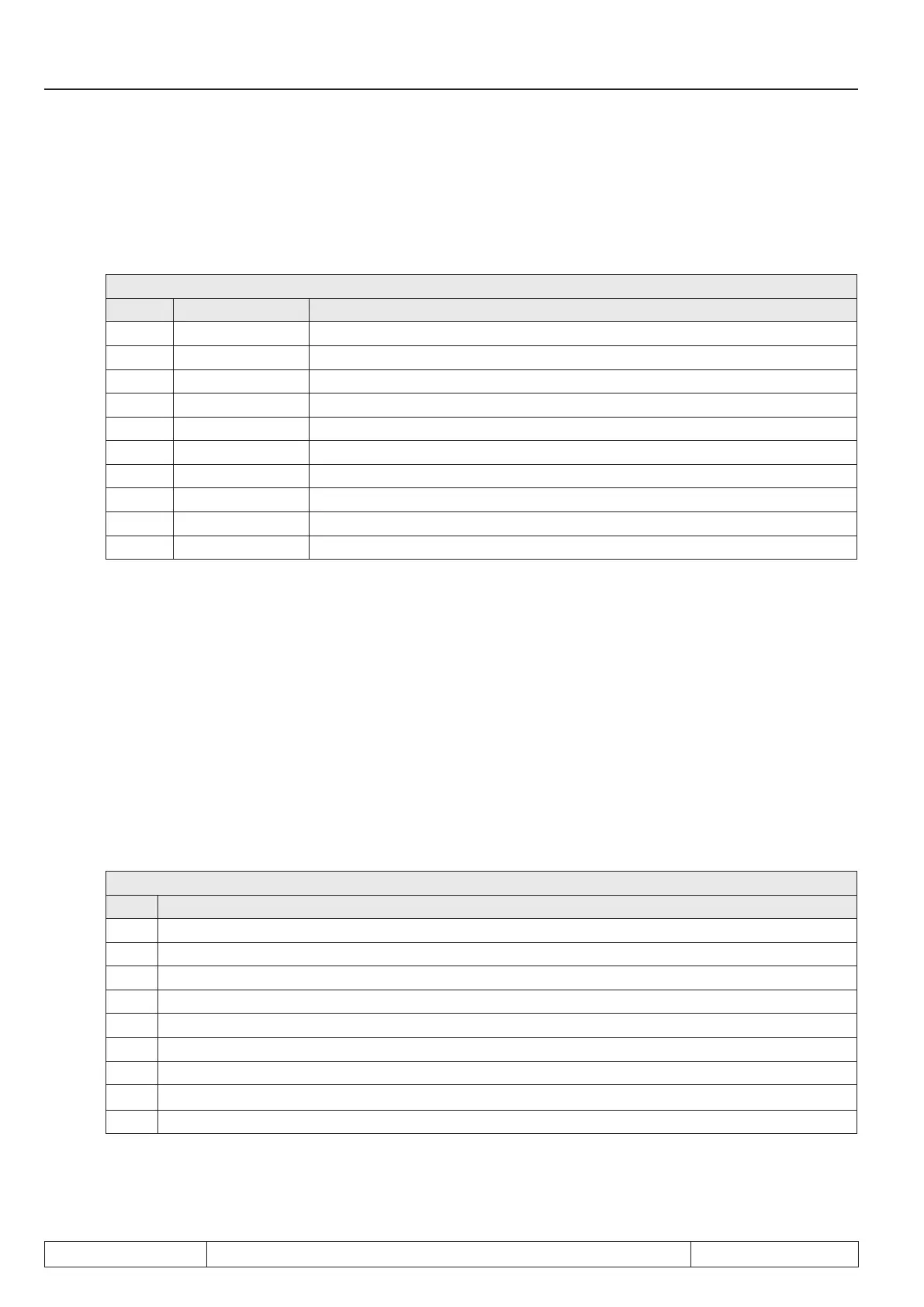
Ec.03, Ec.13: Speed sampling time
Value Scan time Speed resolution when using an incremental encoder with 2500 pulses
0 0,5 ms 12 rpm
1 1 ms 6 rpm
2 2 ms 3 rpm
3 4 ms 1,5 rpm
(factory setting)
4 8 ms 0,75 rpm
5 16 ms 0,375 rpm
6 32 ms 0,1875 rpm
7 64 ms 0,09375 rpm
8 128 ms 0,046875 rpm
9 256 ms 0,0234375 rpm
When using other line numbers:
Specied speed resolution x 2500
–——————–——————–——————
Line number
Speed resolution =
Rotation change (Ec.06, Ec.16)
A rotation change for encoder input 1 can be executed with Ec.06 bit 0...1 and for encoder input 2 with Ec.16.
A system inversion can be activated with bit 4 (value 16). With the system inversion it is possible to run the
motor in reverse direction with positive setting at the shaft, without changing the hardware.
The following adjustments are possible:
Ec.06, Ec.16: Encoder track change
Value Function
Direction of rotation
0 no change
1 Inverted
2 depends on the sign of the actual frequency (initiator)
3 depends on track B (initiator terminal 4)
4-15 reserved
Encoder system
0 no
16 Inverted

 Loading...
Loading...

