Speed measurement
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.11 - 23
7
Attention: if the control release is still set, the drive starts to run automatically.
• Error encoder 1
If no data can be read out from the encoder (value 97), „32: ERROR! encoder 1“ (E.Enc1) is released. At F5-S
the error can be reset either by writing of a system position in Ec.02 or by system position trimming.
• Error enocder interface
Error „52: ERROR! encoder interface“ (E.HYb) only occurs, if either the control board or the encoder interface is
defective, or the voltage supply for the encoder interface is short-circuited by a defective encoder cable (e.g.).
Ec.38 encoder 1 r/w (electronic motor name plate)
Data can be stored and read out in some absolute encoders (e.g. Endat, Hiperface). Thus an „electronic name
plate“ can be stored for the motor/encoder system.
If an inverter is connected the rst time with an encoder which contains an electronic name plate, this is auto-
matically read out, if „data load when switching on = 4: automatic “ is adjusted in Ec.38 (factory setting at F5-S).
KEB servo motors with electronic name plates already contain the complete motor data.
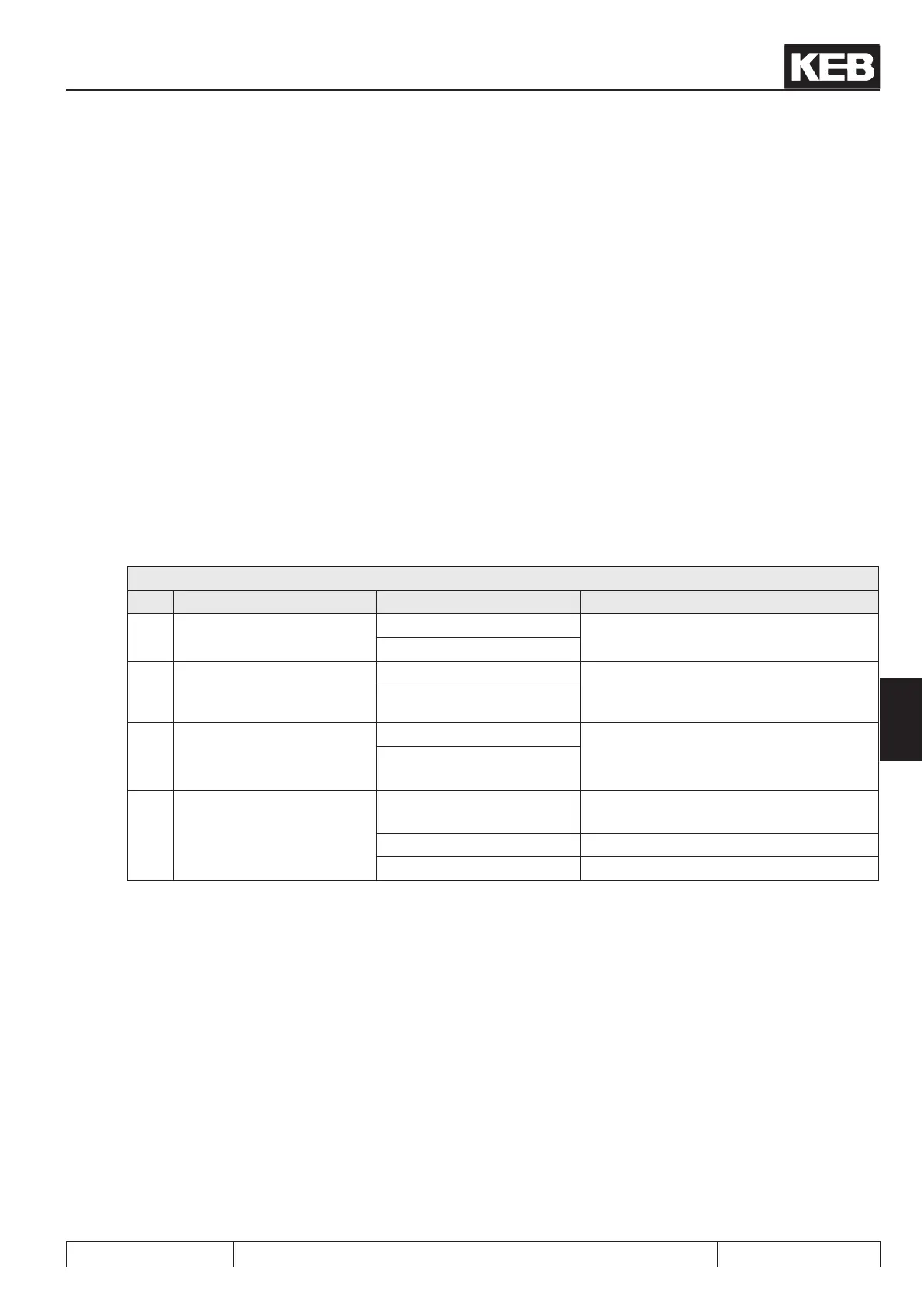
Ec.38: Encoder 1 r/w
Bit Meaning Value Explanation
0 read data
0: reading not active
Activates the reading, value is set to 0
afterwards.
1: reading activated
1 store data
0: storing not active Activates the storing, value is set to 0
afterwards (Supervisor-password pro-
tected)
2: storing activated
2
load data during switching
on
0: not automatically
Activates the automatic data load of the
inverter at the rst start-up
4: automatically
3, 4 data group/ selection
0: system and application
(all)
Motor data, Ec.01, Ec.02, cS.19 and
Ec.03
8: System only motor data, Ec.01 and Ec.02
16: only Ec.02 only Ec.02

 Loading...
Loading...

