The response to errors can be similarly exible.
At each positioning, the inverter calculates in 1ms-cycle a speed and position that the drive
should have at that time, to reach the target in compliance with all settings. This is the so-called speed / position
prole.
Settings
Maximum acceleration /
deceleration
dened by acceleration / deceleration time (oP.28...oP.31)
Maximum jerk dened by S-curve times (oP.32...oP.35 and oP.70...oP.73)
Maximum speed during
positioning
= ru.63 "prole speed" + PS.09 "pos/syn position limit.
The prole speed is either PS.25 "index / speed" or PS.31 "max. speed %" *
oP.10 "max. reference forward" (dependent on PS.00/ bit 4). The speed limits
oP.10 / oP.11 "max. reference" do not act as setpoint limits anymore. oP.14 /
oP.15 "abs. max. reference" remains operative. The error "speed limit exceeded"
is triggered when exceeding the trigger level oP.40 / oP41.
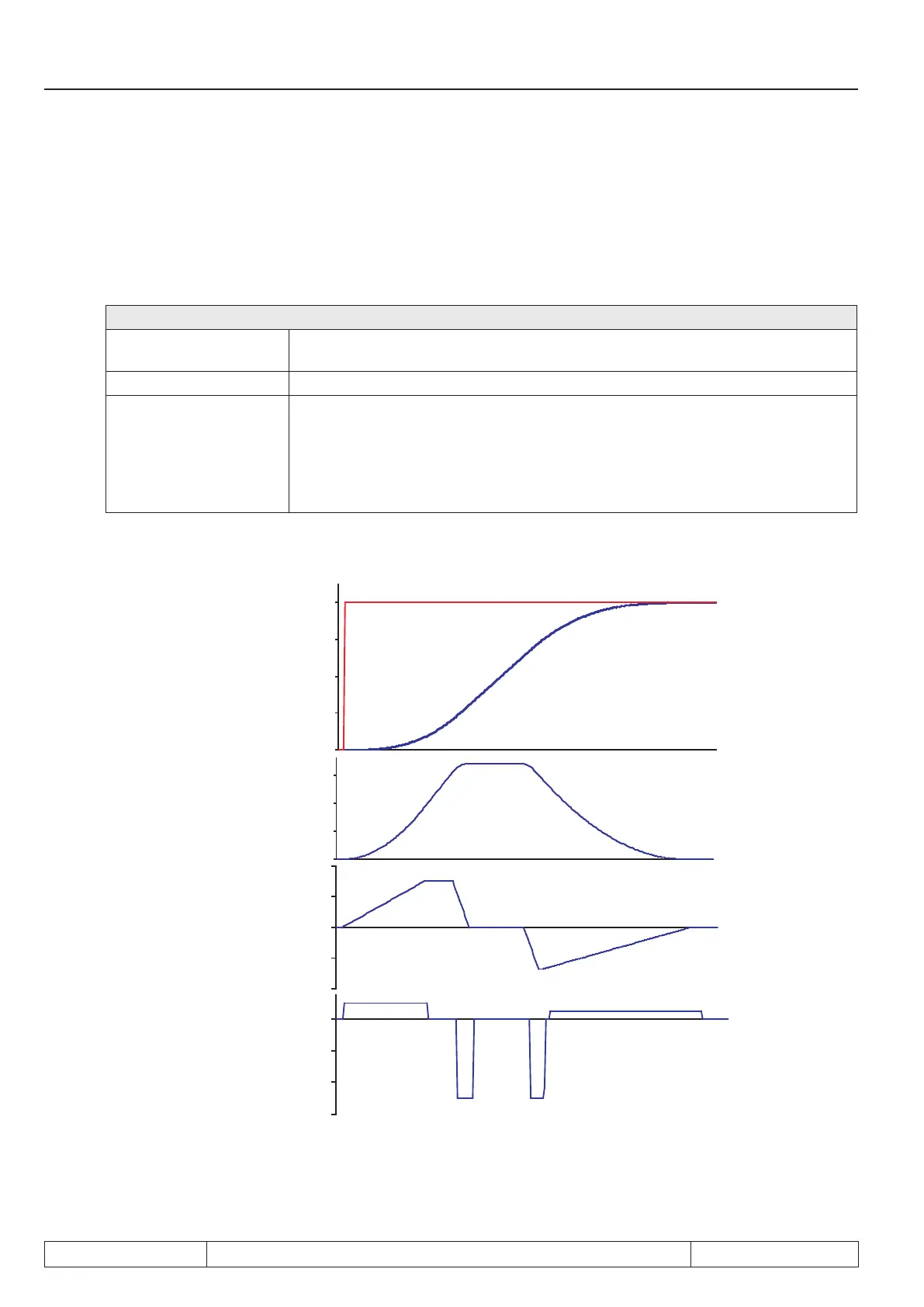
That results in the following example behaviour of position, speed, acceleration, and jolt:
time
ru.61 target
position
ru.56 Set position
Prole speed
acceleration/
deceleration
jerk
If the drive cannot follow the position prole (e.g., due to reaching the torque limits), the position controller
intervenes and changes the setpoint speed with respect to the prole speed. Thereby it is possible that the
programmed values for maximum acceleration / deceleration and maximum jolt are exceeded.
Page 7.12 - 28 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating

 Loading...
Loading...

