Drive stops at target → PS.25 = 0 rpm
next positioning step dened in block 1 → PS.26 = 1
no automatic start, i.e., "continuation of the prole processing" = 0: no and "position setting"
= 0: absolute → PS.27 = 0: no + absolute
● block 1 → PS.23: Index / selection = 1
Position = rst stopping point → PS.24: Index / position = 100000
Drive stops at target → PS.25 = 0 rpm
next positioning step dened in block 2 → PS.26 = 2
Wait for "start positioning" → PS.27 = 0: no + absolute
● block 2 → PS.23: Index / selection = 2
Position = second stopping point → PS.24: Index / position = 200000
Drive stops at the target → PS.25 = 0 rpm
next positioning step back to start → PS.26 = 0
Wait for "start positioning" → PS.27 = 0: no + absolute
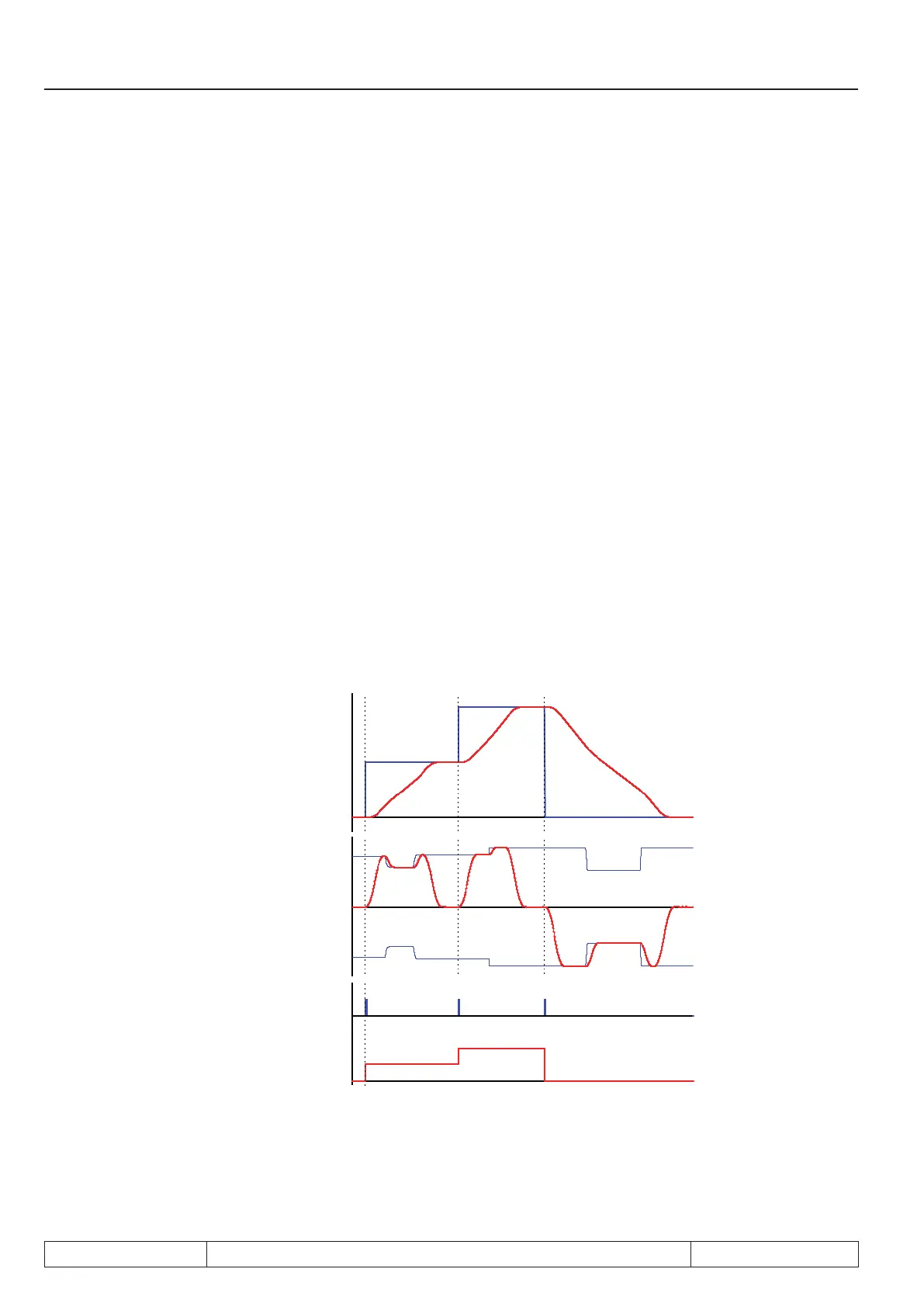
time
I3 (X2A.12) start
positioning
ru.60: act.
position index
ru.63/ -ru.63
prole speed
ru.02: ramp output
display
ru.61: target
position
ru.54: actual
position
Change of the maximum prole speed is possible at any time. The speed / position prole for each positioning
step is adjusted permanently, thus the drive (in compliance with the acceleration and jerk settings) is positioned
with the maximum permitted speed.
Page 7.12 - 48 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating

 Loading...
Loading...

