Output OC must therefore be set when the condition "target window reached" is not set.
→ do.31: Inv. ags for OC = 1: M0 OC = NOT M0
→ do.39: Flag selection for OC = 1: M0
● block 0 → PS.23: Index / selection = 0
Position = 0 → PS.24: Index / position = 0
Permitted max. speed = 1500 rpm → PS.25 = 1500 rpm
next positioning step dened in block 1 → PS.26 = 1
Wait for "start positioning" command → PS.27 = 0: no + absolute
● block 1 → PS.23: Index / selection = 1
Position = rst stopping point → PS.24: Index / position = 100.000
speed up to the rst stopping point → PS.25 = 1000 rpm
next positioning step dened in block 2 → PS.26 = 2
Wait for "start positioning" command → PS.27 = 0: no + absolute
● block 2 → PS.23: Index / selection = 2
Position = second stopping point → PS.24: Index / position = 200.000
speed up to the second stopping point → PS.25 = 1000 rpm
Back to start → PS.26 = 0
Wait for "start positioning" command → PS.27 = 0: no + absolute
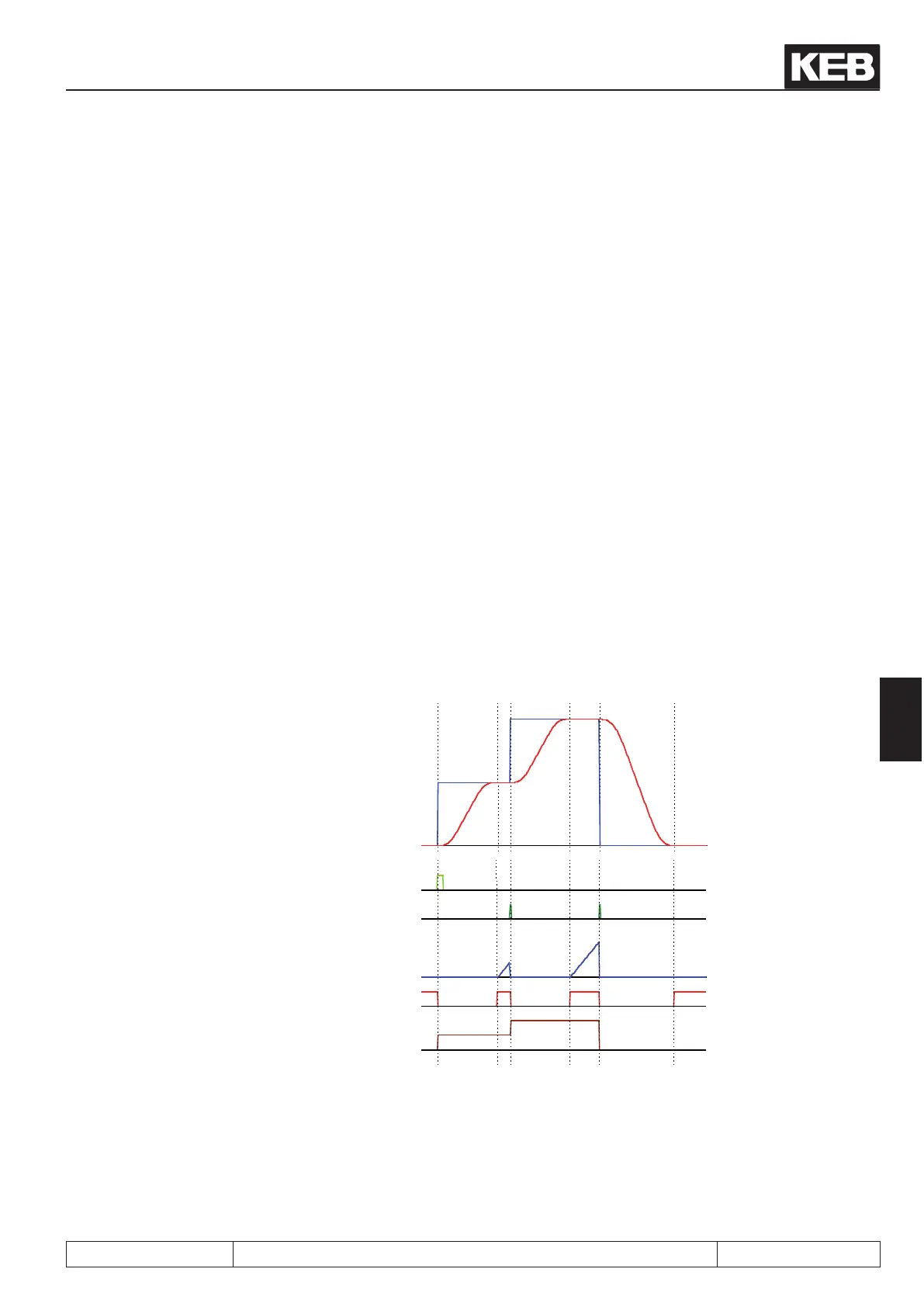
ru.61: target position
ru.56: Set position
„Start positioning“
signal
of ext. control (I3)
ru.43: timer 1 display
„target reached“ signal
automatic generated
„start
positioning“ signal (IB)
ru.60: act. position
index
Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 51
7

 Loading...
Loading...

