Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 61
7
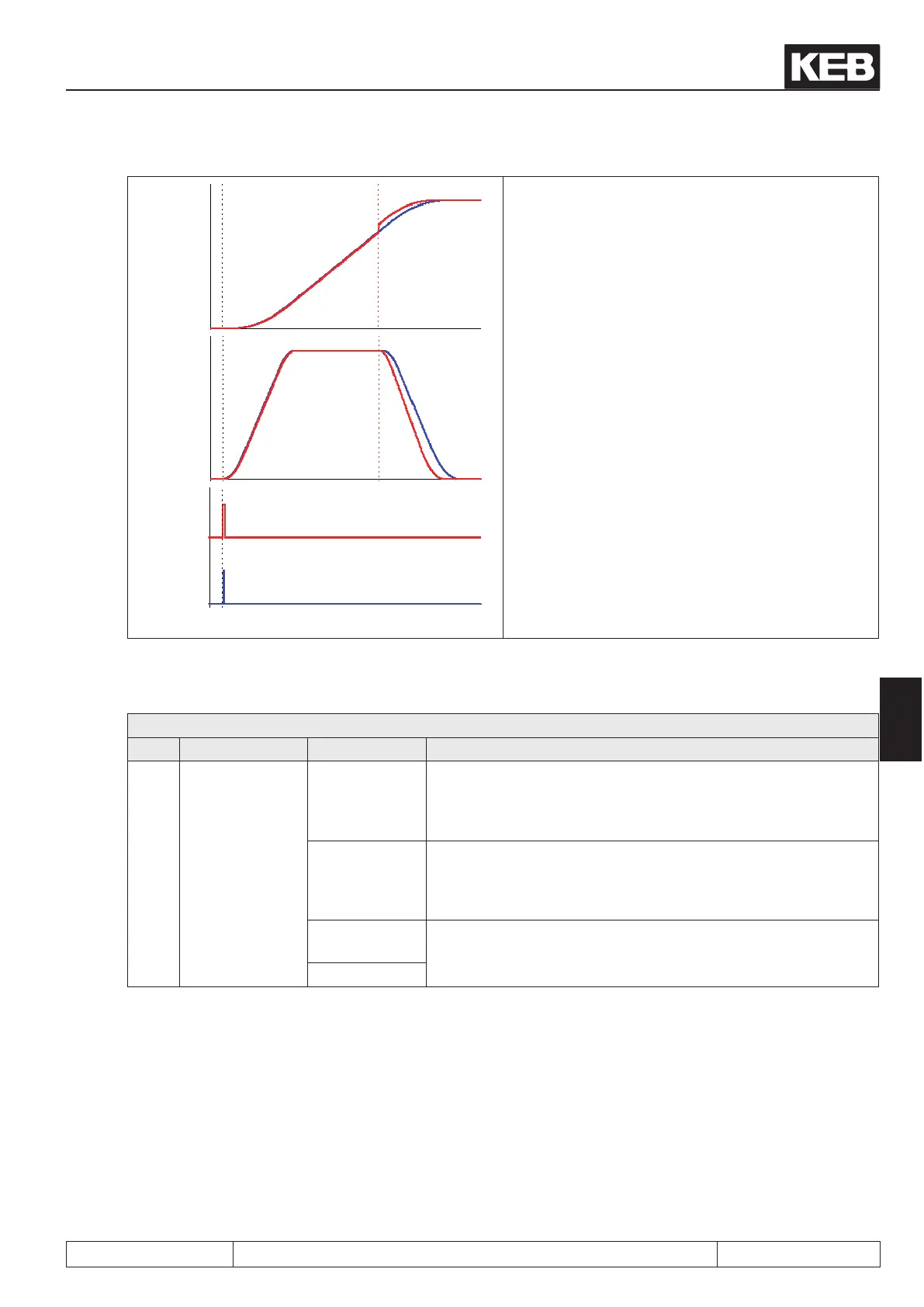
Start positioning
- without correction
- with correction
Speed (without correction)
Speed (with correction /
short ramp)
ru.56: Set position
- without correction
- with correction
The blue curve shows a positioning where the refe-
rence marker does not trigger an adjustment.
For the red curve, it is determined at the reference
marker
that the drive is closer to the target than expected.
If breaking would occur with the adjusted decelerati-
on times, the target would be overshot.
By PS.44 = 25% the drive is permitted to decelerate
more sharply.
The comparison of the red and the blue speed curve
show that the drive accelerates equally in both cases,
but decelerates more sharply after the adjustment.
Thereby, the adjustment can be still be carried out
during the running positioning and the target position
can still be reached.
If no successful adjustment can be executed during the running positioning, there are two different response
options which can be selected via PS.00:
PS.00: Posi / synchronous mode
Bit Meaning Value Explanation
6 / 7
If position not
reachable
0: Stop
If the target position is inaccessible due to the adjustment, even
with the adjusted ramp times, the drive stops and posts the sta-
tus message "123: position inaccessible". This status can be re-
set only by deactivation of the positioning module.
64: Stop + new
attempt
If the target position is inaccessible due to the adjustment with
the precept ramps, the drive completes the original positioning
prole and then automatically starts a new positioning to reach
the target position.
128: new at-
tempt
Do not use
192: reserved

 Loading...
Loading...

