ru.84
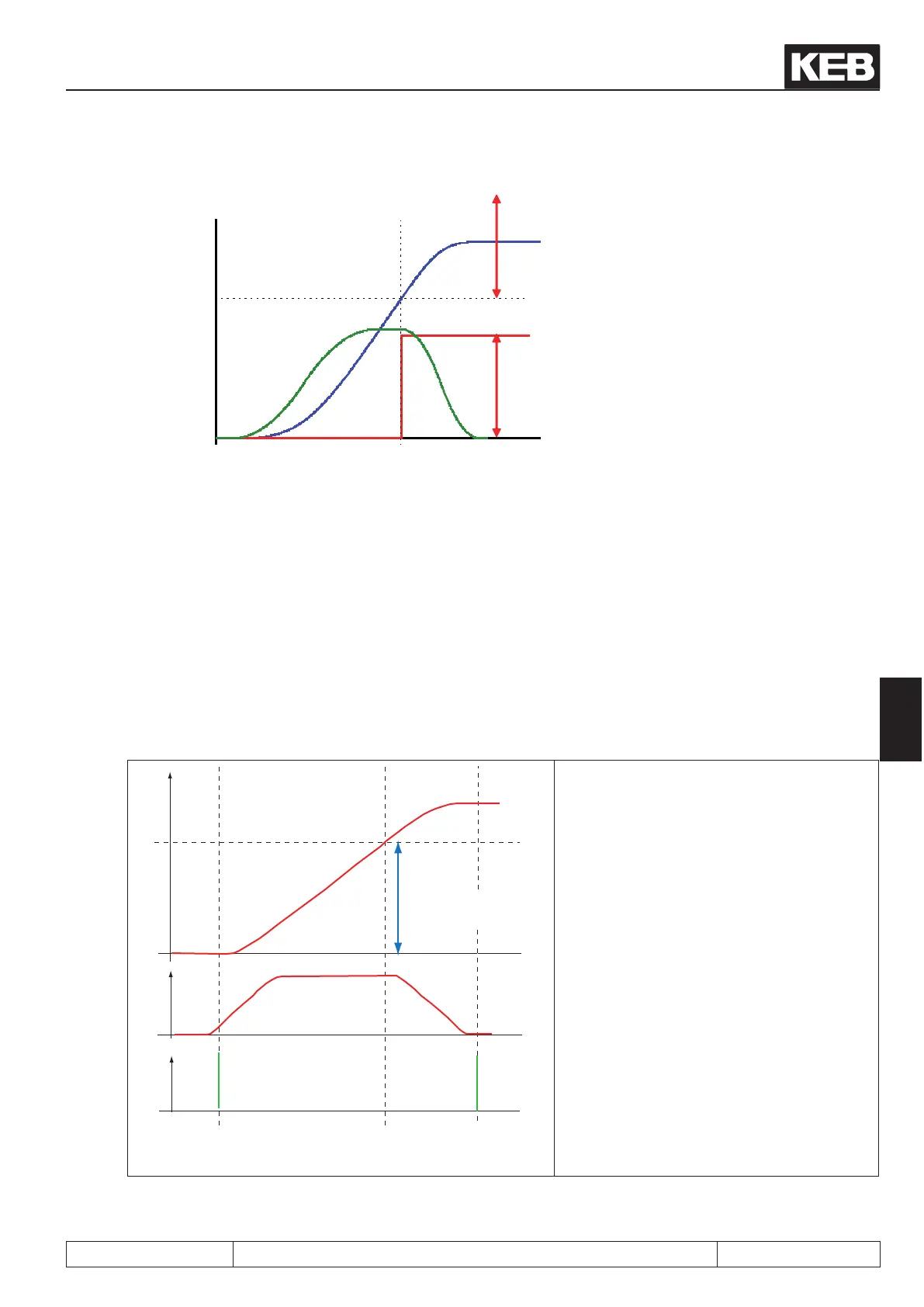
ru.54: actual position
ru.84: accessible rel. position
ru.02: ramp output display
New „start positioning“
ru.54 "actual position" + ru.84
"accessible rel. position" is greater
than the target.
I.e., the target would be inaccessi-
ble without ramp decrease.
In this example
the same values are set for the
deceleration ramps as for the acce-
leration ramp.
The ramp times are reduced by
PS.32, thus the target is reached in
a shorter distance than ru.84.
The new "start positioning" command must be made within the positioning, in the acceleration or constant run-
ning phase. In the deceleration phase to the final target approach, the new starting pulse leads to the status
"position inaccessible".
If the new starting pulse is received in the correct phase, but the target is inaccessible despite ramp adjustment
, the drive goes into the state "position inaccessible" with the default ramp/jerk times.
The parameter PS.32 is similar to the parameter PS.44 "limit adjustment ramp %" in its mode of action. PS.44,
however, works only for ramp changes necessitated by flying referencing with adjustment. PS.32, on the other
hand, is responsible for adjustments based on new target settings.
Furthermore, the ramp can also be changed during the acceleration phase by PS.32 if the new target setting
makes it necessary.
With the parameter PS.53 "distance for no abort", unwanted "start positioning" commands can be masked.
Since the last "start positioning" command, the drive must have travelled a greater distance than PS.53 in order
that a new starting command is accepted during a running positioning.
PS.53: max. termi-
nation distance
Speed
rst „start posi“
target reached
Range where new „start
positioning“ commands are
not accepted
Example:
At the "start positioning command", ru.84
indicates that the target must be at least
200000 increments away from the current
actual position to be accessible with the pro-
grammed ramps.
The target is far away and the drive
positions to the target.
The deceleration phase starts, if the amount
of ru.84 ahead of the target is reached.
Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 67
7

 Loading...
Loading...

