The response to this status is selectable via PS.00:
PS.00: Posi / synchronous mode
Bit Meaning Value Explanation
6 / 7
If position not
reachable
0: Stop
The drive stops with the adjusted ramps. Status ru.00 displays „123:
position not reachable“. This status is reset only by deactivation of
the positioning module. While this status is active, no new "start posi-
tioning" commands are accepted.
64: Stop
+ new
attempt
The drive stops with the adjusted ramps. Status ru.00 displays „123:
position not reachable“ during the deceleration ramp. After reaching
standstill, a new positioning to the target position starts automatically
(status changes to "122: positioning active").
128: new
attempt
This function is required only for sequential positioning: The target
positions of the individual positioning steps are traversed, even if the
target speed preset in PS.25 cannot be reached. This permits che-
cking where the positioning sequence has to be changed or adjusted
so that target position and target speed can be reached. This should
facilitate the parametrisation of the index speeds / positions.
192: reser-
ved
reserved
8
Ignore position,
if not reachable
0: off
The behaviour of the drive is determined by PS.00 bit 6 / 7 (explana-
tion see above)
256: on
If the new target is inaccessible, the "start positioning" command
is ignored. With a digital output, the ignoring of the position can be
displayed. The positioning module remains active, new "start positio-
ning" commands are executed. The digital output can be reset only by
deactivation of the positioning module.
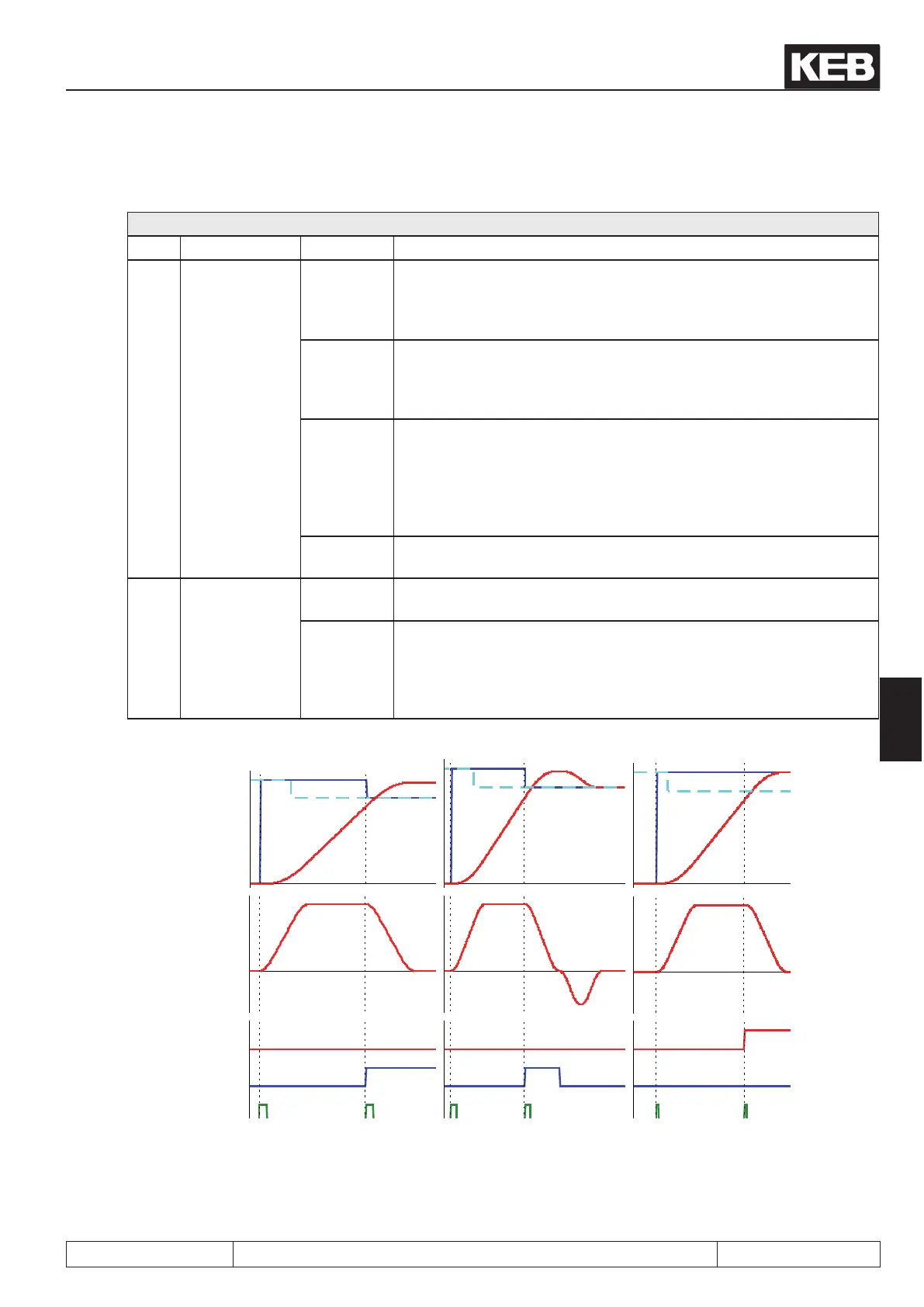
Stop
Stop + new attempt Ignore not reachable target
Start posi
-
Target not
reachable
Ignore new
target
PS.24: index / position
ru.61: target position
ru.02: ramp
output display
Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 69
7

 Loading...
Loading...

