Page 7.13 - 30 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Protective functions
Example:
3 motors are operated alternately on the inverter.
assigned number engaged if the active set (ru.26) is equal to:
Motor 1 0
0, 1, 2, 3
Motor 2 1 4, 5
Motor 3 2 6, 7
Then the following programming must be done:
Set 0 Fr.08 = 0 Set 4 Fr.08 = 1 Set 6 Fr.08 = 2
Set 1 Fr.08 = 0 Set 5 Fr.08 = 1 Set 7 Fr.08 = 2
Set 2 Fr.08 = 0
Set 3 Fr.08 = 0
The motor protection function is calculated separately for all motors, i.e., for each individual motor, a separate
overload counter is running.
If one of the counters reaches the limit of 100%, the behaviour programmed in Pn.14 "motor protection function
response" is triggered.
Motor protection function for F5-S
The motor protection function is activated if the ratio of apparent current (ru.15) to continuous current (Is/Id)
exceeds the value of dr.50 "motor protection min Is/Id". The release time for this point is set in dr.34 "motor
protection time min Is/Id". The release time for maximum current is set in dr.35 "motor protection time Imax". If
a higher value is programmed in dr.35 than in dr.34, the time dr.34 is valid in the whole range.
The maximum current is dened by dr.33 "DSM max. torque" or dr.15 "max. torque FU". The smaller of the two
values determines the maximum current.
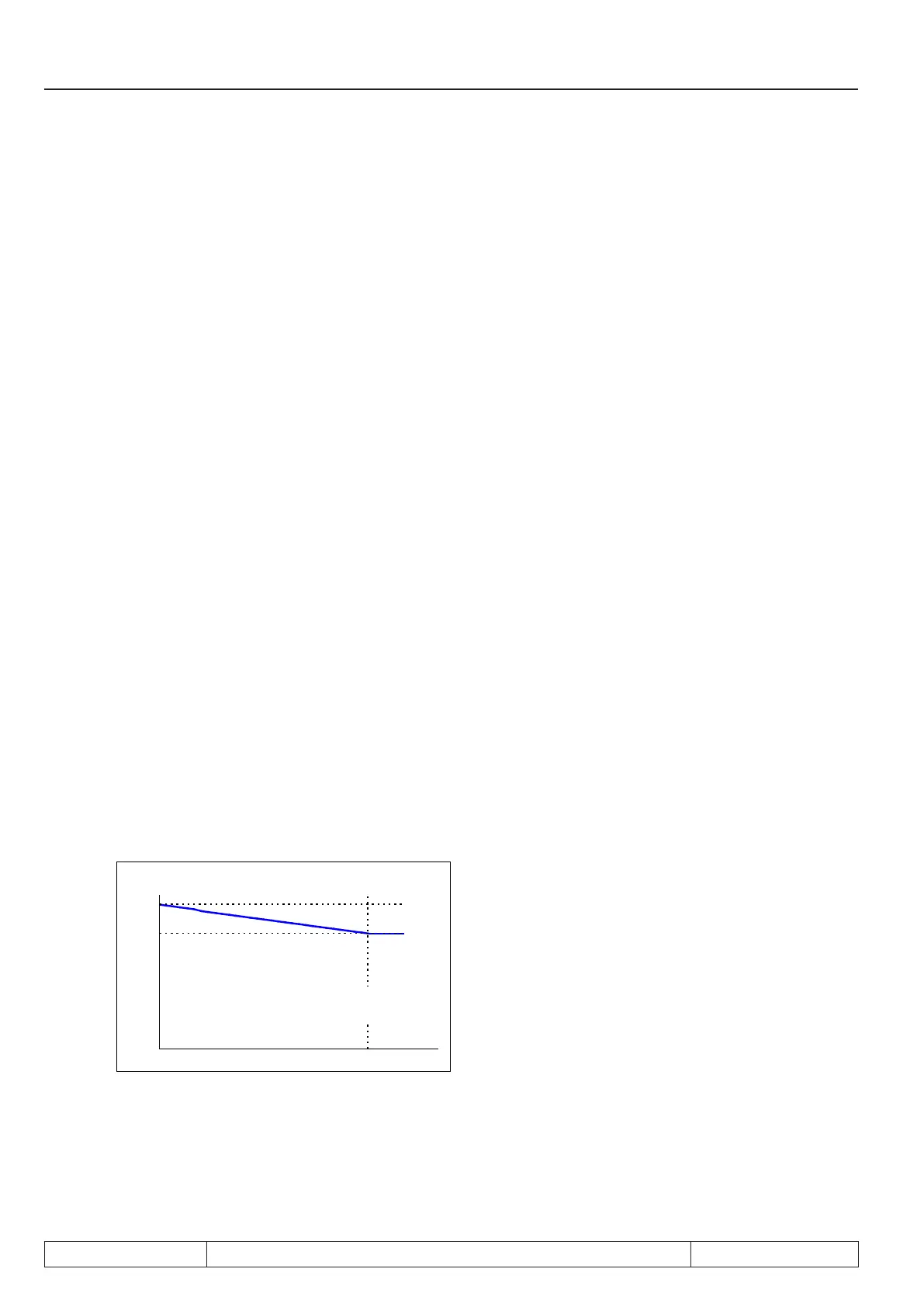
The continuous current is speed-dependent. At speed 0, it is equal to dr.28 "DSM stand still current" and at
dr.24 "DSM rated speed" it reaches the value dr.23 "DSM rated current".
Drehzahl
Dauerstrom (Id)
dr.28
DSM Stillstandsdauerstrom
dr. 23
DSM Nennstrom
dr.24
DSM Nenndrehzahl
The tripping time is the time required by the internal counter to count from 0 to 100%. On reaching 100%, error
"30: ERROR! Motor protection function" (E.dOH) is triggered.

 Loading...
Loading...

