Page 7.15 - 4 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Special functions
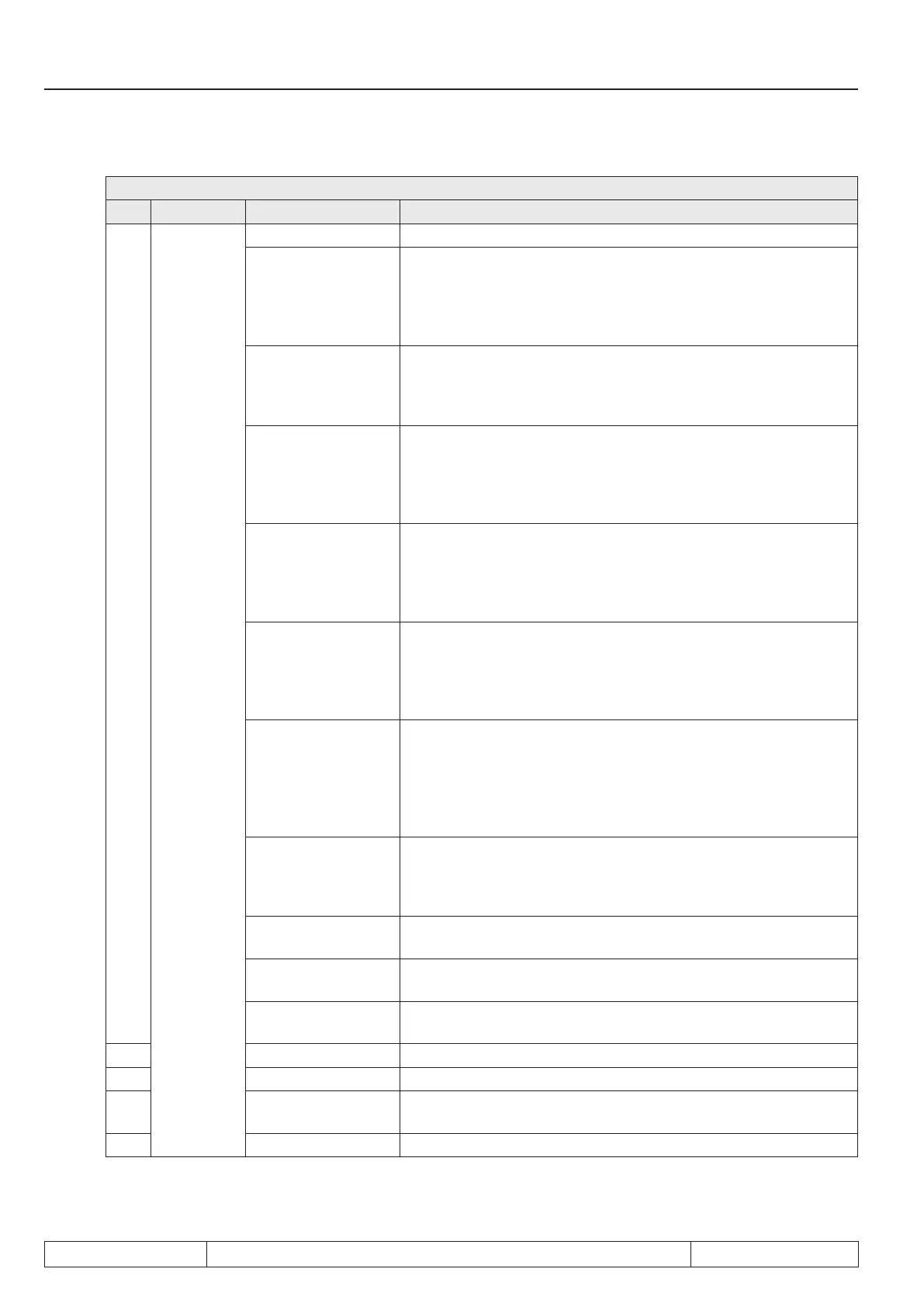
Pn.28: DC braking mode
Bit Meaning Value Explanation
0...3
DC Braking
Mode
0: no DC braking DC braking is never triggered
1: no direction of ro-
tation and actual va-
lue = 0
DC braking, if the setpoint reaches 0 rpm after the ramp generator
(ru.02 "display ramp output") and the rotation setting is missing.
The braking time is determined by Pn.30 (independent of the ac-
tual speed). If the rotation setting is applied again, the DC braking
is aborted.
2: disabling the di-
rection of rotation
DC braking after removal of the rotation setting. The braking time
is dependent on Pn.30 and the actual frequency.
1, 2
Re-application of the rotation setting does not abort the DC bra-
king.
3: Change of direc-
tion of rotation
DC braking as soon as the rotation setting changes (different di-
rection of rotation or no setting). The braking time is dependent on
Pn.30 and the actual frequency (ru.03).
1, 2
Re-application of the rotation setting does not abort the DC bra-
king.
4: no direction of ro-
tation and actual va-
lue < Pn.32
DC braking if the actual frequency ru.03
2
is lower than Pn.32 "DC
braking start level" and the rotation setting is missing. The braking
time is dependent on Pn.30 and Pn.32
3
Re-application of the rotation setting does not abort the DC bra-
king.
5: Deceleration and
actual value < Pn.32
DC braking if the actual frequency ru.03
1
is lower than Pn.32 "DC
braking start level" and the rotation setting is missing. The braking
time is dependent on Pn.30 and Pn.32
3
Re-application of the rotation setting does not abort the DC bra-
king.
6: Setpoint < Pn.32
The set value before the ramp generator (ru.01 "set value display)
is smaller than Pn.32 "DC braking start level". The braking time is
dependent on Pn.30 and the actual frequency (ru.03).
1, 2
To leave the status „22: standstill after DC braking“, ru.01 must be
higher than Pn.32 + LE.16 „operating hysteresis“. An increase of
the setpoint does not abort the DC braking.
7: Digital input time-
limited
DC braking, as soon as an input programmed to DC brake (Pn.29)
is active. The braking time is dependent on Pn.30 and the actual
frequency (ru.03).
1, 2
restart only after the input is deactivated.
8: as long as the di-
gital input is set
DC-braking as long as an input programmed to DC-braking is ac-
tive.
9: at start of the mo-
dulation
DC braking after modulation release (direction of rotation + con-
trol release) for the time Pn.30.
10: Conditions
DC braking according to the conditions programmed in bit 4..7.
The braking time is equal to Pn.30 "DC-brake time"
4 16: DCB after nop DC braking after status "0: no control release"
4
5 32: DCB at switch on DC braking after power-on-reset (power on)
4
6
64: DCB for auto-
retry
DC braking after automatic restart
4
7 128: DCB after LS DC braking after status "70: standstill"
4

 Loading...
Loading...

