Page 7.1 - 12 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Operating and appliance data
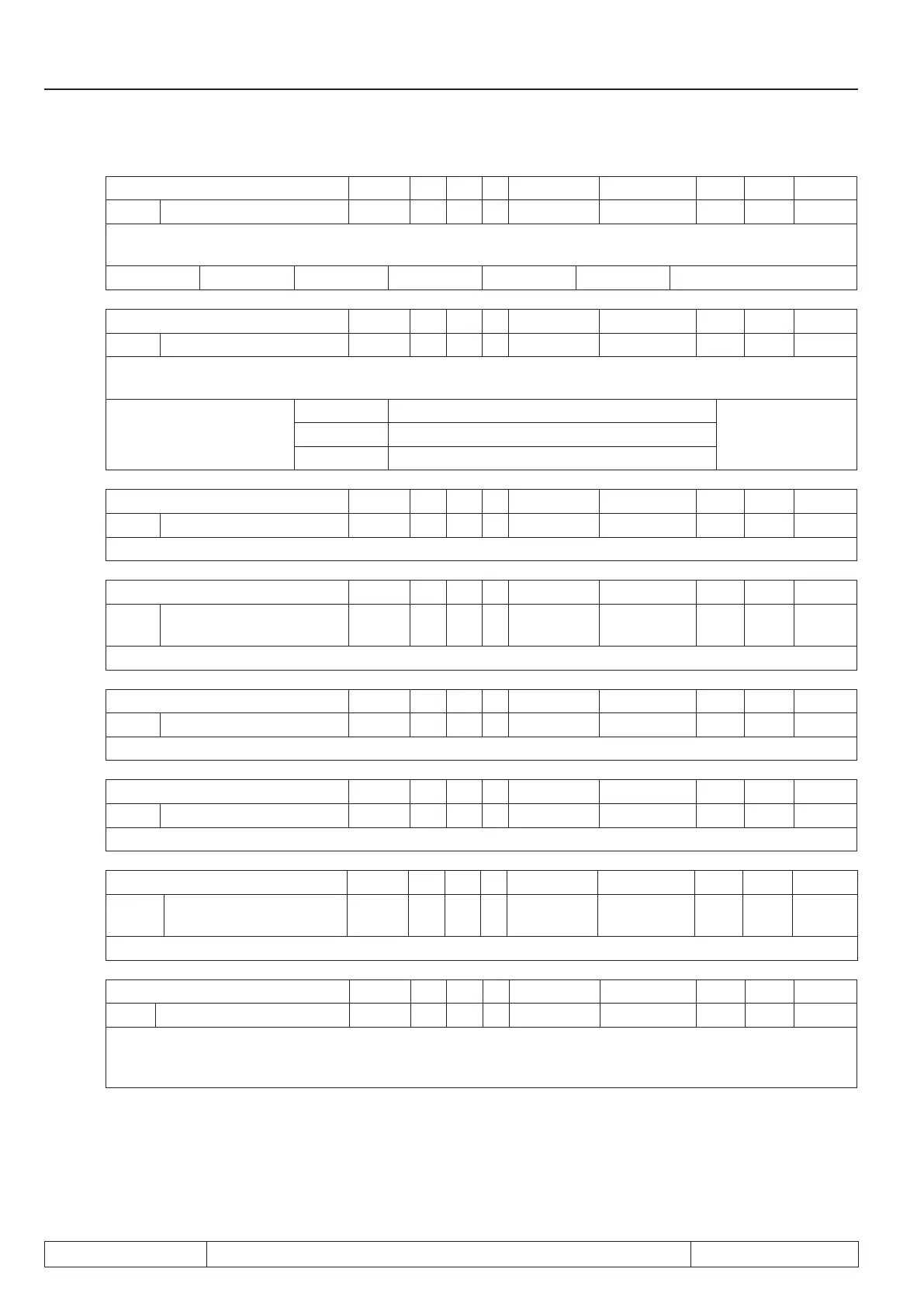
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.45 act. switching frequency 022Dh RO - - 0 4 1 - -
Indicates the actual switching frequency of the inverter. The displayed values correspond to the following
switching frequencies:
0 = 2 kHz 1 = 4 kHz 2 = 8 kHz 3 = 12 kHz 4 = 16 kHz
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.46 Motor temperature (opt.) 022Eh RO - - 0 255: off 1 °C -
Indicates the current motor temperature. Precondition for this function is aspecial power circuit. The tempe-
rature detection is connected to the terminals T1/T2.
0: T1/T2 closed
253, 254: broken cable; short circuit; detection error
255: T1/T2 open
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.47 Actual torque limit motor 022Fh RO - - -10000 10000 0.01 Nm -
This parameter indicates the actual adjusted set torque limit for motor operation.
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.48 Actual torque limit gene-
rator
0230h RO - - -10000 10000 0.01 Nm -
This parameter displays the currently adjusted set torque limit for generatoric operation.
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.49 actual ref. torque 0231h RO - - -10000 10000 0.01 Nm -
This parameter displays the preadjusted setpoint torque at the input of the torque controller.
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.50 actual ref. torque 0232h RO - - -10000 10000 0.01 Nm -
This parameter displays the preadjusted setpoint torque at the input of the torque controller.
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.51 Power module tempe-
rature
0233h RO - - -40 120 1 °C -
This parameter displays the actual heat sink temperature.
Parameter Addr. R PG E Min. value Max. value Res. [?] Default
ru.52 Ext. PID out display 0234h RO - - -100.0 100.0 0.1 % -
A universal PI-controller is integrated into the inverter. It can be used externally as well as internally. So that
the controller is as independent as possible, the displayed manipulated variable, referring to a +/- signal, is
output in percent.

 Loading...
Loading...

