9.17 CAN-bus interface (X6)
The interface for connection to the CAN-bus (default : 500 kBaud). The integrated profile is
based on the CANopen DS301 communication profile and the DS402 drive profile. The fol-
lowing functions are available in connection with the position controller: Jogging with variable
speed, homing run (zeroing to reference), start motion task, start direct task, digital setpoint
provision, data transmission functions and many others. Detailed information can be found in
the CANopen manual. The interface is at the same
Detailed information can be found in the CANopen manual. The interface is at the same elec-
trical potential as the RS232 interface. The analog setpoint inputs can still be used. With the
optional expansion module -2CAN- the two interfaces for RS232 and CAN, which otherwise
use the same connector X6, are separated onto two connectors (➜ # 140).
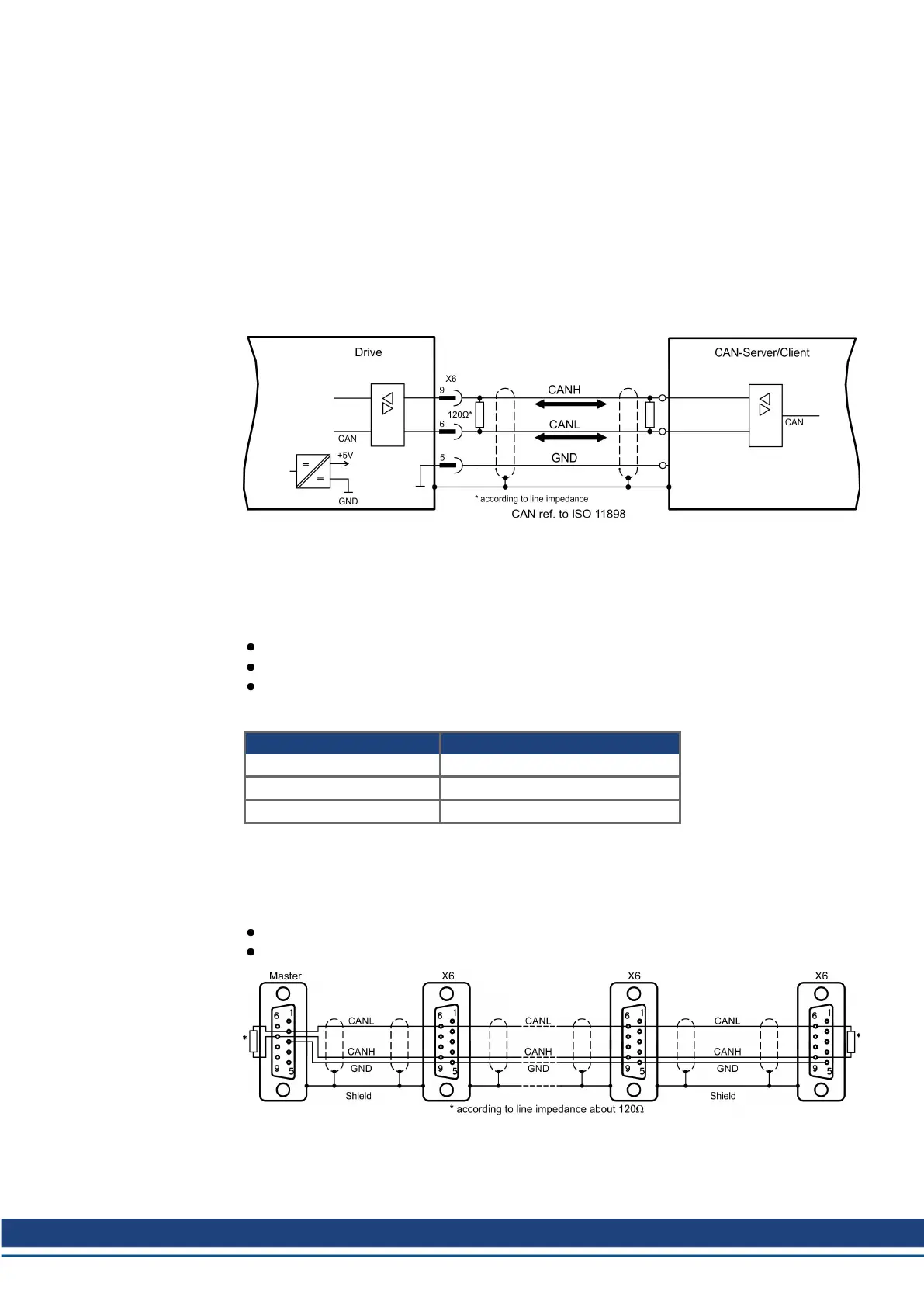
CAN-bus cable
To meet ISO 11898, a bus cable with a characteristic impedance of 120 Ω should be used.
The maximum usable cable length for reliable communication decreases with increasing
transmission speed. As a guide, you can use the following values which we have measured,
but they are not to be taken as assured limits:
Characteristic impedance 100-120 Ω
Cable capacitance max. 60 nF / 1000m
Lead loop resistance 159.8 Ω / 1000m
Cable length, depending on the transmission rate (samples)
Baudrate / kBaud max. cable length / m
1000 10
500 70
250 115
Lower cable capacitance (max. 30 nF / km) and lower lead resistance
(loop resistance, 115Ω / km) make it possible to achieve greater distances.
(Characteristic impedance 150 ± 5Ω => terminating resistor 150 ± 5Ω).
For EMC reasons, the SubD connector housing must fulfill the following requirements:
metal or metalized housing
provision for cable shielding connection on the housing, large-area connection
S748-772 Instructions Manual | 9 Electrical Installation
Kollmorgen | kdn.kollmorgen.com | July 2019 105

 Loading...
Loading...





