S748-772 Instructions Manual | 9 Electrical Installation
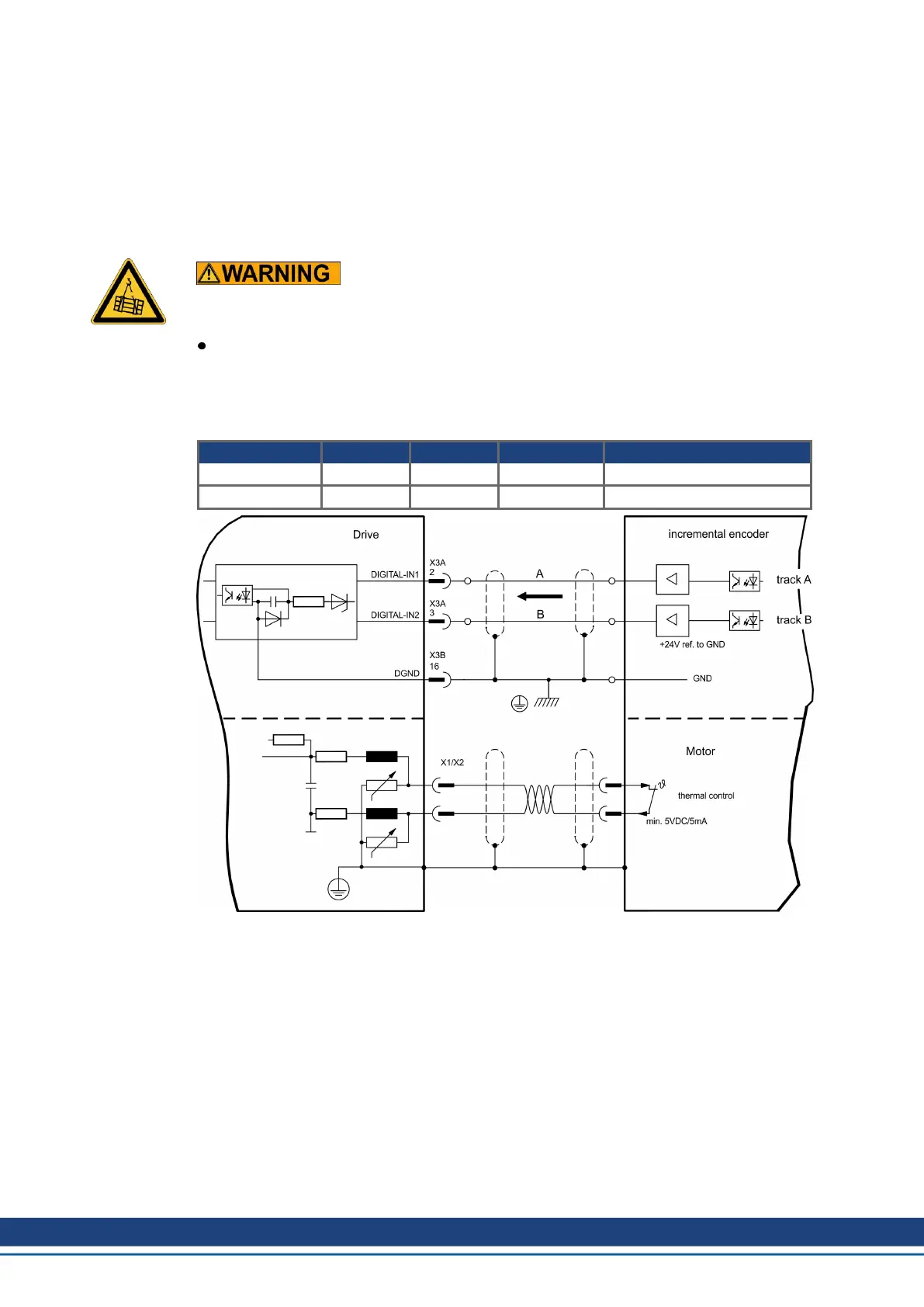
9.12.15 ROD (AquadB) 24V (X3)
Wiring of a 24V incremental encoder (ROD AquadB) as a feedback system (primary or sec-
ondary, (➜ # 74)). This uses the digital inputs DIGITAL-IN 1 and 2 on connector X3.
Every time the 24V auxiliary voltage is switched on, the amplifier need start-up information
for the position controller (parameter value MPHASE). Depending on the setting of FBTYPE
a wake&shake is executed or the value for MPHASE is taken out of the servo amplifier's
EEPROM.
Vertical load can fall!
With vertical load the load could fall during wake&shake, because the brake is not active and
torque is not sufficient to hold the load.
Don't use wake&shake with vertical load (hanging load).
The thermal control in the motor is connected to X1 or X2. If cable lengths of more than 25 m
are planned, please consult our customer service.
Frequency limit: 100 kHz, transition time tv ≤ 0.1μs
Type FBTYPE EXTPOS GEARMODE Remarks
AquadB 24V 12 2 2 MPHASE from EEPROM
AquadB 24V 16 2 2 MPHASE with wake & shake
90 Kollmorgen | kdn.kollmorgen.com | July 2019

 Loading...
Loading...





