7 CiA402 device profile
7.10 Cyclic sync torque mode (cst)
235
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x6073 | 0x6873 - Max current
Tip!
More torque characteristics can be found on the Internet:
Maximum current (maximum overload current of the device)
•100% ≡ rated motor current (0x6075
or 0x6875 for axis B)
• This parameter serves to limit the inverter output current.
• The value to be set here results from the maximum torque required for the process and the connected motor.
The value is calculated according to the following rule of thumb:
• For synchronous motors (SM):
Axis A: 0x6073 [%] = M
max_process
[Nm] / 0x6076 [Nm] * 100
Axis B: 0x6873 [%] = M
max_process
[Nm] / 0x6876 [Nm] * 100
• For asynchronous motors (ASM):
Axis A: 0x6073 [%] = M
max_process
[Nm] / 0x6076 [Nm] * 115
Axis B: 0x6873 [%] = M
max_process
[Nm] / 0x6876 [Nm] * 115
• For both motor types:
Axis A: 0x6072
[%] = M
max_process
[Nm] / 0x6076 [Nm] * 100
Axis B: 0x6872
[%] = M
max_process
[Nm] / 0x6876 [Nm] * 100
• Depending on the motor frame size, the Lenze setting of 0x6073 (or 0x6873 for axis B) and 0x6072
(or 0x6872
for axis B) serves to achieve a rated current of 150 % in case of synchronous motors and a rated current of 130 %
in case of asynchronous motors. If the process (application) needs torques above these limits, these two
parameters have to be set accordingly based on the motor data.
• If a value is set here which, multiplied by the rated motor current (0x6075
or 0x6875 for axis B) leads to a higher
current value than the maximum device current, the value is limited device-internally to a maximum device
current / rated motor current of 100 % * and output as warning in the logbook. The value set here, however, is
not changed.
Note!
This parameter is not identical to the ultimate motor current I
ULT
(0x2D46:1 or 0x3546:1 for axis B!
• The ultimate motor current is a limit value for synchronous motors in order to protect their magnets.
• The value to be set here should always be considerably below the ultimate motor current!
Setting range (min. value | unit | max. value) Lenze setting
0.0 % 3276.7 150.0 %
Write access CINH OSC P RX TX Scaling: 1/10 UNSIGNED_16
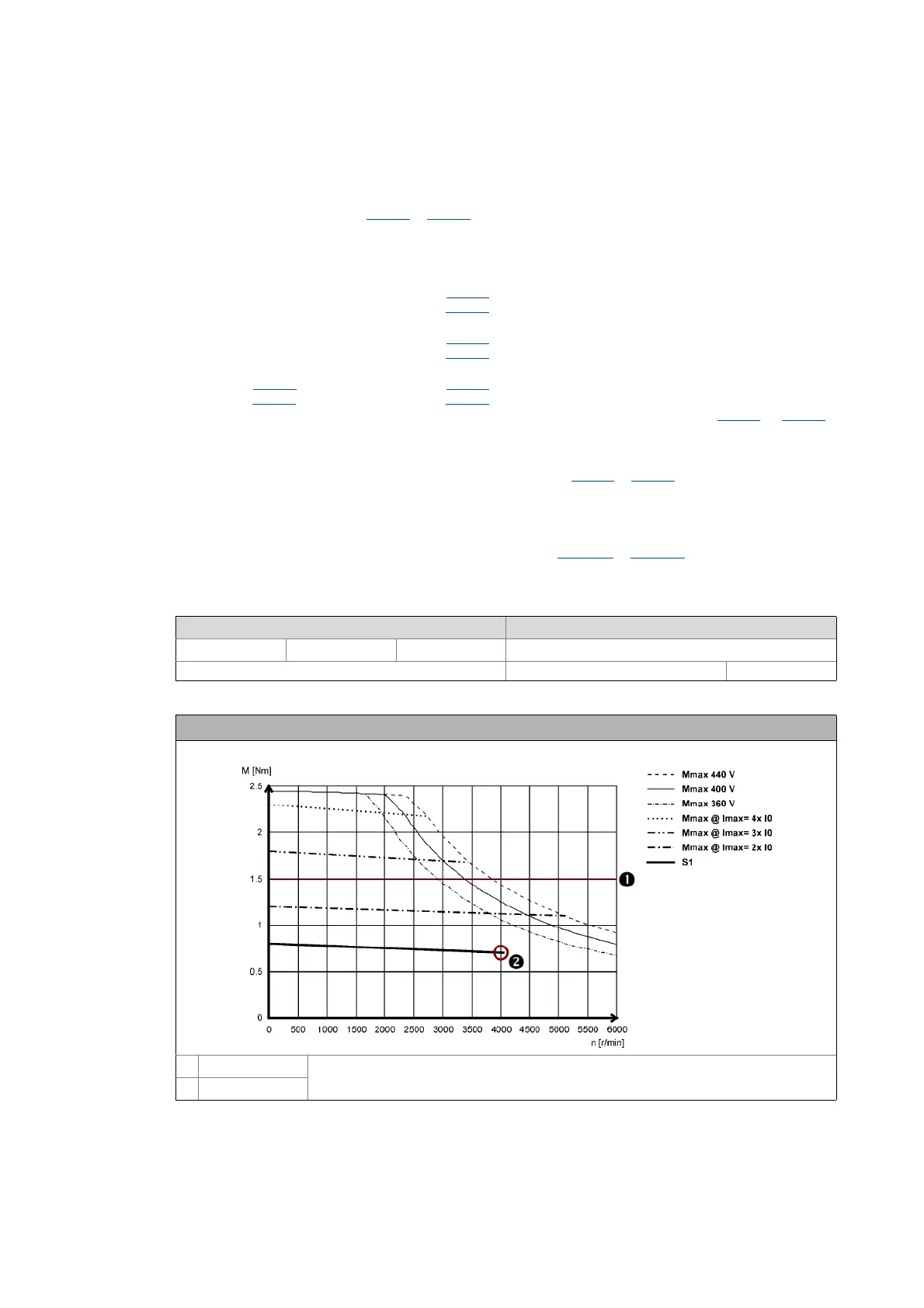
Example calculation based on the torque characteristics for MCS06C41 Lenze motor
The data apply to a mains voltage 3 x 400 V
M
max_process
0x6073 = M
max_process
/ M
rated_motor
* 100 % = 1.5 Nm / 0.7 Nm * 100 % = 215 %
M
rated_motor