Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
53
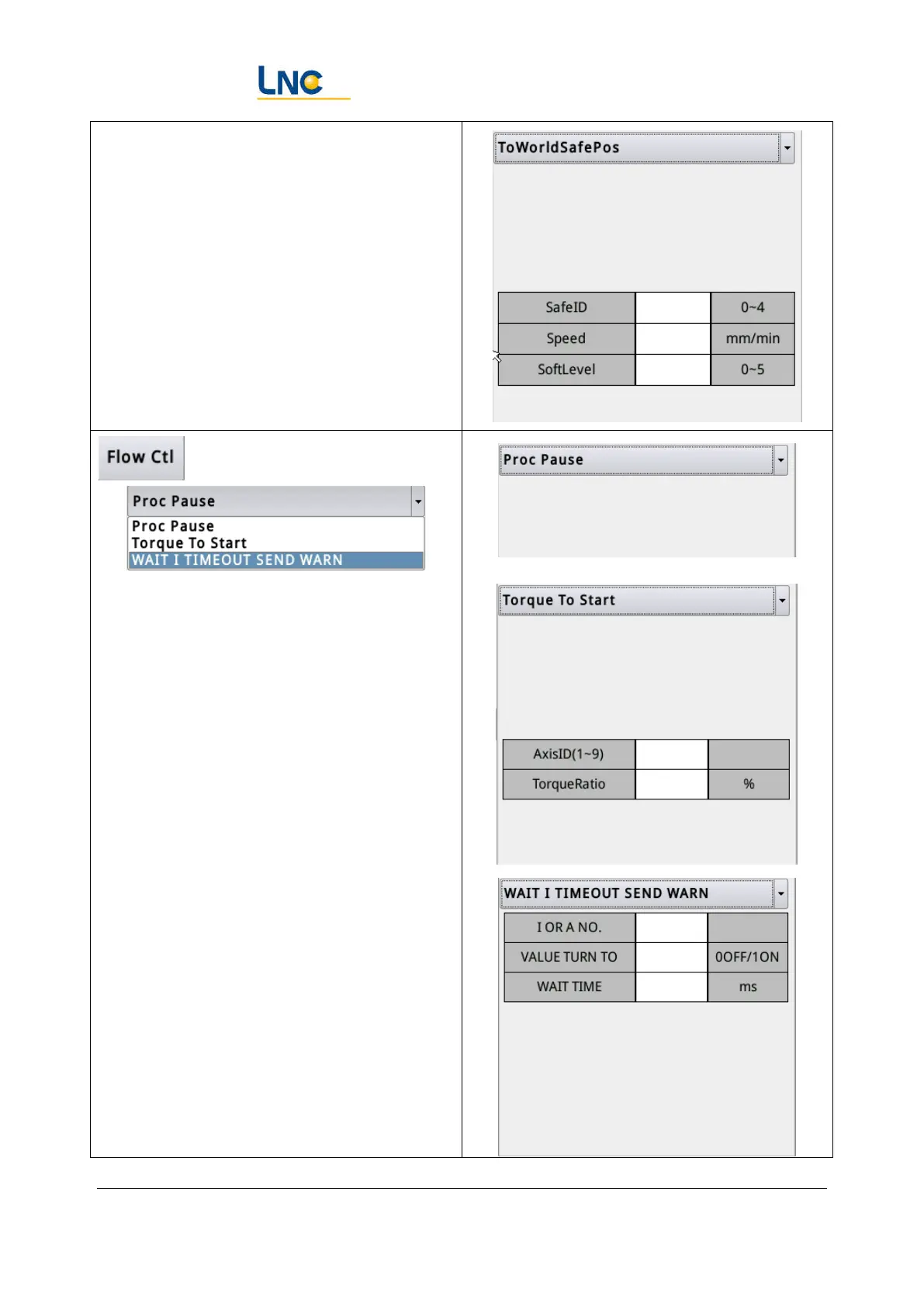
Provide three methods to control the program
flow
Program pause: put the program into a pause
state
Wait for the torque to reach the start: the
action is in a waiting state until the torque
of a certain axis arrives, and then continue
to run the subsequent action.
Issue warning when Wait I timeout:it is
equivalent to Wait I command, but if the
waiting time is exceeded, a warning signal will
be issued.
 Loading...
Loading...