4-181 Detailed explanation of command words
4MELFA-BASIC IV
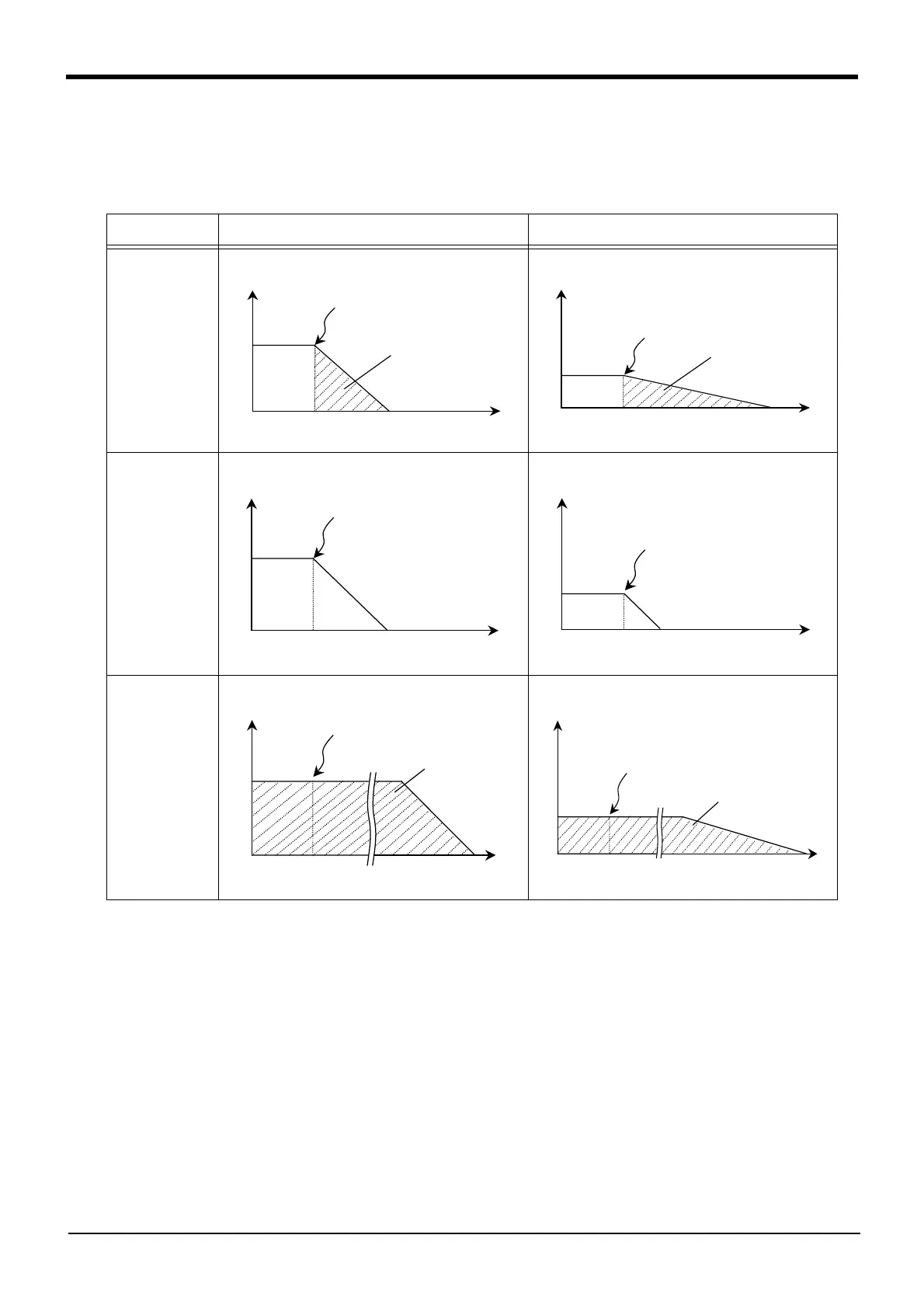
Table 4-15 shows conceptual diagrams that illustrate the effects of the 3 types of program execution stop
commands when the interrupt conditions are met while the robot is moving according to a movement
instruction.
Table 4-15:Conceptual diagram showing the effects of different stop commands
[Related instructions]
Act (Act)
External override 100% (maximum speed) External override 50%
Stop type 1
(If the argument is
omitted)
S1=S2
Stop type 2(S)
Execution com-
plete stop(L)
S3=S4
Speed
Time
Interrupt
Stop distance S1
Time
Speed
Interrupt
Stop distance S2
Speed
Time
Interrupt
Speed
Time
Interrupt
Decelerate and stop immediately
Speed
Time
Interrupt
Total travel distance S3
Speed
Time
Interrupt
Total travel distance S4
 Loading...
Loading...


