Calibrating a Force Sensor
Model 493.02 Controller Service
Calibration
135
Task 5 Gain/Delta K Calibration
If you using Gain/Delta-K for your calibration type, complete the
following procedure. If not, complete Task 6 Gain/Linearization
Calibration on page 142 or Task 7 Millivolt/Volt Calibration on
page 153
Calibrate tension Force sensors can be calibrated so that a positive output represents
actuator compression and a negative output represents actuator
tension, and vice versa.
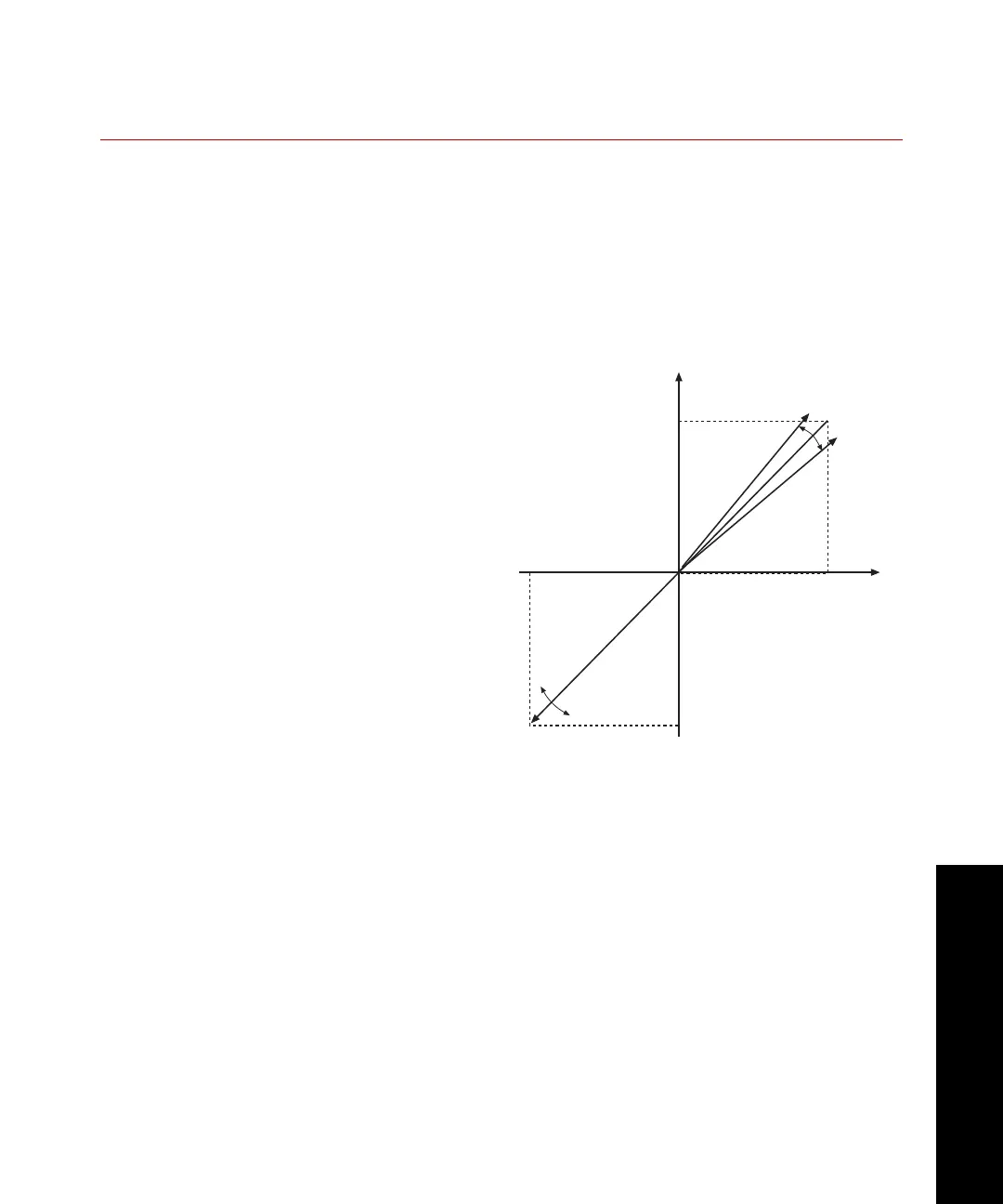
You calibrate the
negative side of the
output with gain and
the positive side of
the output with Delta
K.
Delta K compensates
for differences in
symmetry between
positive and negative
outputs.
Calibrate
compression at 80%
full scale for each
range.
Note This procedure assumes a positive command extends the actuator
and a negative command retracts the actuator. If not, use the
opposite polarity for any values given.
Gain controls Pre-Amp gain is a selectable gain amplifier with predefined values.
Since changes in Pre-Amp gain can cause spikes in the feedback
signal, Pre-Amp gain can only be adjusted when hydraulics are off.
Post-Amp gain is a finer, operator-defined gain control that can be
adjusted when hydraulics are on.
The Total gain value is calculated by multiplying the Pre-Amp and
Post-Amp gain values. If the total desired gain amount is known (from
a calibration sheet), you can enter the amount in the Total gain box
mechanical input
Indicated output
∆K > 1
∆K = 1
∆K <
Gain
 Loading...
Loading...