19
TABELA 3
Odbiornik SMXI, SMXIS, OIX, OXIT w “Trybie I lub II”
wyjście opis
Wyjście nr 1 Tryb krokowy
Wyjście nr 2
Otwiera częściowo; wartość ustawiona fabrycznie:
otwiera do połowy ustalonego przesuwu (można
ją zmienić podczas fazy wyszukiwania położeń lub
korzystając z programatora Oview)
Wyjście nr 3 Otwiera
Wyjście nr 4 Zamyka
Odbiornik OXI, OXIT zaprogramowany w “Trybie II rozszerzonym”
polecenie opis
Polecenie nr 1 Tryb krokowy
Polecenie nr 2
Otwiera częściowo; wartość ustawiona fabrycznie:
otwiera do połowy ustalonego przesuwu (można
ją zmienić podczas fazy wyszukiwania położeń lub
korzystając z programatora Oview)
Polecenie nr 3 Otwiera
Polecenie nr 4 Zamyka
Polecenie nr 5 Stop
Polecenie nr 6 Tryb krokowy Zespół mieszkalny
Polecenie nr 7 Tryb krokowy Wysoki priorytet
Polecenie nr 8 Otwiera częściowo 2
Polecenie nr 9 Otwiera częściowo 3
Polecenie nr 10 Otwiera i blokuje automatykę
Polecenie nr 11 Zamyka i blokuje automatykę
Polecenie nr 12 Blokuje automatykę
Polecenie nr 13 Odblokowuje automatykę
Polecenie nr 14 Światło pomocnicze Timer
Polecenie nr 15 światło pomocnicze ON/OFF
3.11 - Pierwsze włączenie i kontrola połączeń
Po podłączeniu zasilania do centrali sterującej, należy przeprowadzić
następujące kontrole:
• Sprawdzić, czy dioda Bluebus miga szybko przez kilka sekund, a następnie
czy miga regularnie z częstotliwością 1 mignięcia na sekundę.
• Jeśli instalacja jest wyposażona w fotokomórki, należy sprawdzić, czy ich
diody migają (zarówno TX, jak i RX); sposób migania nie jest ważny, ponieważ
zależy od innych czynników.
• Sprawdzić, czy lampa ostrzegawcza przyłączona do wyjścia FLASH jest
zgaszona.
Jeśli wynik wszystkich powyższych kontroli nie jest zgodny z oczekiwanym,
konieczne jest odłączenie napięcia od centrali sterującej i sprawdzenie
wykonanych wcześniej poszczególnych połączeń elektrycznych.
3.12 - Rozpoznawanie przyłączonych urządzeń
Po pierwszym włączeniu (paragraf 3.11), konieczne jest przeprowadzenie
rozpoznawania przez centralę sterującą urządzeń przyłączonych do wejść
“Bluebus”, “Stop” i enkodera.
UWAGA! – Rozpoznawanie musi zostać przeprowadzone, nawet jeśli nie
zainstalowano żadnego urządzenia połączonego z centralą sterującą.
UWAGA DOTYCZĄCA SILNIKÓW Z FALOWNIKIEM! – Jeśli korzysta
się z silnika z falownikiem z rodziny MEIN, przed przeprowadzeniem
rozpoznawania podłączonych urządzeń, należy włączyć funkcję “L7
Falownik”, zob. Tabela 5 w paragrae 5.1.
Konieczność przeprowadzenia tej czynności jest sygnalizowana równoczesnym
miganiem diod “L1” i “L2” na centrali.
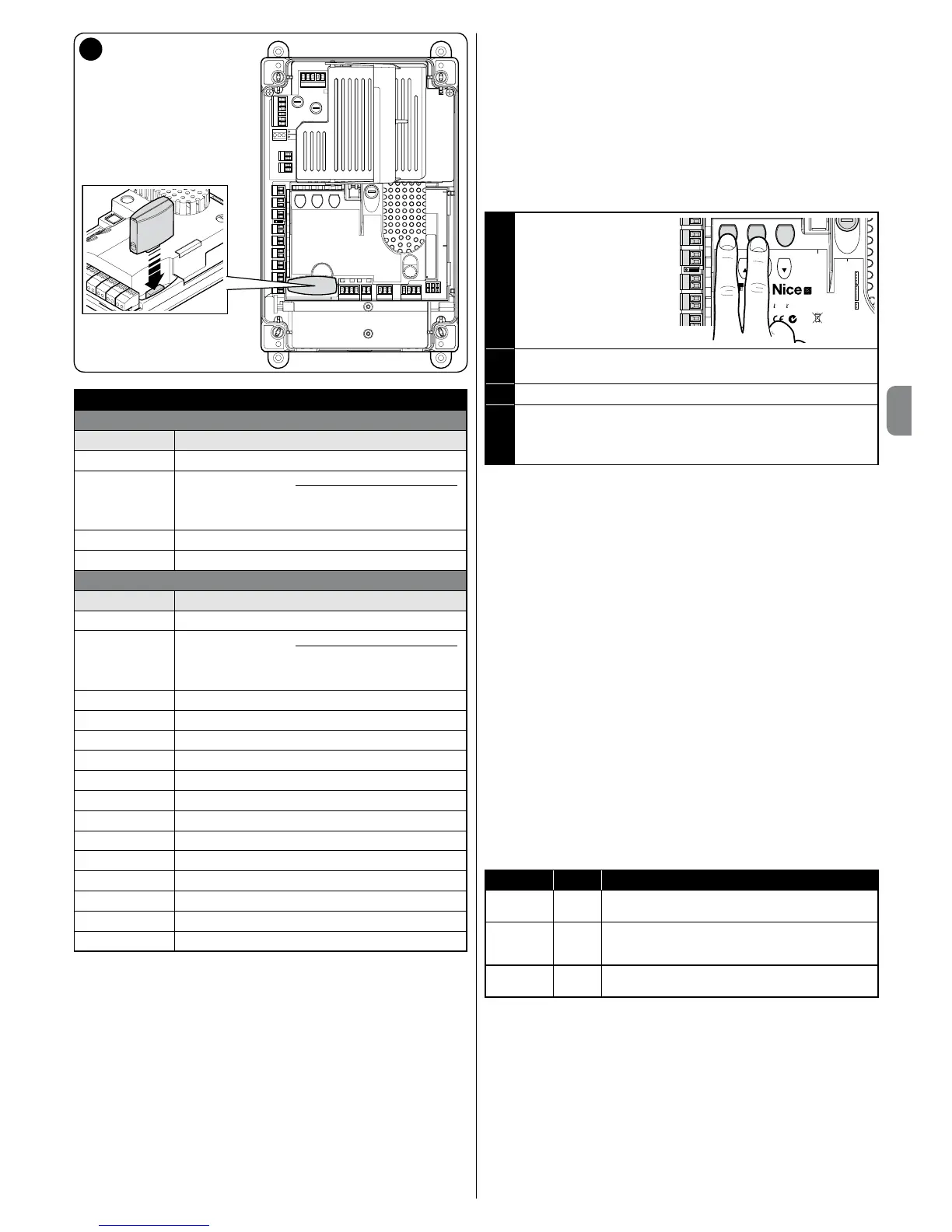
W celu przeprowadzenia rozpoznawania urządzeń, należy:
01. Nacisnąć równocześnie
i przytrzymać przyciski
[Open] i [Set]
Open
Stop
Set
Close
L1 L2 L3 L4 L5 L6 L7 L8
BusT4
Fuse 3.15AF
Stop
OSE
8K2
PP
Open
Close
Flash
2
Bluebus
to push
buttons
to internal
control
to internal
brake
-20° C +55° C
DIC1
N19771
02. Zwolnić przyciski, gdy diody "L1" i "L2" zaczynają szybko migać (po
około 3 sekundach)
03.
Odczekać kilka sekund aż centrala zakończy rozpoznawanie urządzeń
04. Po zakończeniu rozpoznawania, dioda zacisku STOP musi być
zapalona, a diody “L1” i “L2” muszą zgasnąć (mogą zacząć migać
diody “L3” i “L4” w celu zasygnalizowania, że nie przeprowadzono
rozpoznawania położeń).
Procedurę tę należy powtórzyć, jeśli zostanie przeprowadzona jakaś
zmiana w urządzeniach przyłączonych do zacisków BlueBus i Stop (np.
po przyłączeniu nowego urządzenia do centrali sterującej). Operację
należy przeprowadzić również wówczas, gdy zostaje przyłączony
falownik lub silnik z enkoderem.
3.13 - Rozpoznawanie położeń otwarcia i zamknięcia
Po przeprowadzeniu rozpoznawania urządzeń podłączonych do centrali
sterującej (paragraf 3.12), centrala musi rozpoznać położenia otwarcia i
zamknięcia bramy.
UWAGA! - Procedura dla silników z elektronicznym wyłącznikiem
krańcowym: po przeprowadzeniu procedury rozpoznawania położe-
nia otwarcia i zamknięcia, konieczne jest przeprowadzenie 3 pełnych
manewrów. Podczas wykonywania tych manewrów, brama zbliża się
stopniowo do zapisanych wcześniej położeń, aż do osiągnięcia położeń
zaprogramowanych.
Rozpoznawanie jest przeprowadzane według rożnych procedur w zależności
od rodzaju silnika:
- Silnik z elektronicznym wyłącznikiem krańcowym (enkoder), zob.
paragraf 3.14;
- Silnik z falownikiem z rodziny MEIN, zob. paragraf 3.15;
- Silnik z mechanicznym wyłącznikiem krańcowym, zob. paragraf 3.16.
3.14 - Rozpoznawanie położeń otwarcia i zamknięcia z
elektronicznym wyłącznikiem krańcowym (enkoder)
Możliwe jest zaprogramowanie 3 położeń, w sposób opisany poniżej:
Położenie Dioda Znaczenie
A1 L1 Żądane położenie maksymalnego otwarcia. Po
dotarciu w to położenie brama zatrzymuje się
AP L5 Położenie częściowego otwarcia. Położenie, w któ-
rym brama zatrzymuje się po otrzymaniu polecenia
częściowego otworzenia.
A0 L8 Położenie częściowego zamknięcia. Po dotarciu w
to położenie brama zatrzymuje się.
Jeśli brama znajduje się w położeniu zamkniętym, należy ręcznie umieścić ją
na wysokości ok. 50 cm od ziemi, korzystając z systemu manewru awaryjnego
(zob. instrukcja użytkowania silnika) w celu uniknięcia, w przypadku obrotu w
odwrotnym kierunku, wypadnięcia z gniazd lin nośnych (bramy segmentowe)
lub nadmiernego zwinięcia rolety
Uwaga!
- jeśli kierunek obrotu nie odpowiada ustawionemu kierunkowi (przy-
cisk Open = kierunek otwierania), należy odłączyć zasilanie i zamienić
miejscami połączenia “V” i “W” (odwrócenie fazy) na złączu silnika (rys.
19).
- jeśli podczas ruchu brama zatrzymuje się, a dioda L6 miga, należy
ustawić funkcję “Odwrócony kierunek obrotów”; zob. Tabela 5.
W celu przeprowadzenia procedury, należy:

 Loading...
Loading...