18
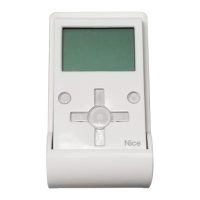
3.10 - Conexión de un receptor radio
La central de mando presenta un conector tipo SM para la conexión de un
receptor radio (accesorio opcional, no suministrado) modelo SMXI, SMXIS, OXI
o OXIT o similares.
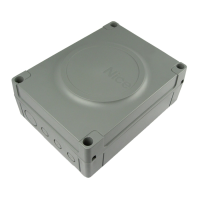
Para activar el receptor radio hay que desconectar la alimentación eléctrica de
red a la central y activar el receptor como muestra la g. 19.
En la Tabla 3 se indican las acciones ejecutadas por la central de mando en
función de las salidas activadas o por los mandos enviados por el receptor
radio.
Nota - Para más información, consultar el manual de instrucciones del receptor.
19
TABLA 3
Receptor SMXI, SMXIS, OIX, OXIT en “Modo I o II”
salida descripción
Salida N°1 Paso a paso
Salida N°2
Abre parcial; valor de fábrica: abre mitad de carrera (se
puede modicar durante la fase de adquisición de las
medidas o utilizando el programador Oview)
Salida N°3 Abre
Salida N°4 Cierra
Receptor OXI, OXIT programado en “Modo II extendido”
mando descripción
Mando n°1 Paso a paso
Mando n°2
Abre parcial; valor de fábrica: abre mitad de carrera (se
puede modicar durante la fase de adquisición de las
medidas o utilizando el programador Oview)
Mando n°3 Abre
Mando n°4 Cierra
Mando n°5 Stop
Mando n°6 Paso a paso Condominio
Mando n°7 Paso a paso Alta prioridad
Mando n°8 Abre parcial 2
Mando n°9 Abre parcial 3
Mando n°10 Abre y bloquea automatización
Mando n°11 Cierra y bloquea automatización
Mando n°12 Bloquea automatización
Mando n°13 Desbloquea automatización
Mando n°14 Luz de cortesía Timer
Mando n°15 Luz de cortesía ON/OFF
3.11 - Primer encendido y control de las conexiones
Después de activar la alimentación eléctrica a la central de mando, realizar las
siguientes vericaciones:
• Comprobar que el led Bluebus parpadee rápidamente unos segundos y luego
regularmente a una frecuencia de 1 parpadeo por segundo.
• Si en la instalación hay fotocélulas, comprobar que sus leds (TX y RX)
parpadeen; el tipo de parpadeo no es signicativo porque depende de otros
factores.
• Comprobar que el intermitente conectado a la salida FLASH esté apagado.
Si no se cumplen estas condiciones, es necesario desactivar la alimentación
eléctrica a la central y vericar las conexiones eléctricas que se realizaron
anteriormente.
3.12 - Reconocimiento de los dispositivos conectados
Después del primer encendido (apartado 3.11), es necesario hacer ejecutar
a la central de mando el reconocimiento de los dispositivos conectados a las
entradas “Bluebus”, “Stop” y encoder.
¡ATENCIÓN! - El procedimiento debe ejecutarse incluso si no se ha
conectado ningún dispositivo a la central de mando.
NOTA SOBRE EL MOTOR CON INVERTER - Si se utiliza un motor con
inverter familia MEIN, antes del reconocimiento de los dispositivos
conectados es necesario activar la función “L7 Inverter”; ver la Tabla
5 del apartado 5.1.
La necesidad de ejecutar esta operación es indicada por el parpadeo simultáneo
de los leds “L1” y “L2” de la central.
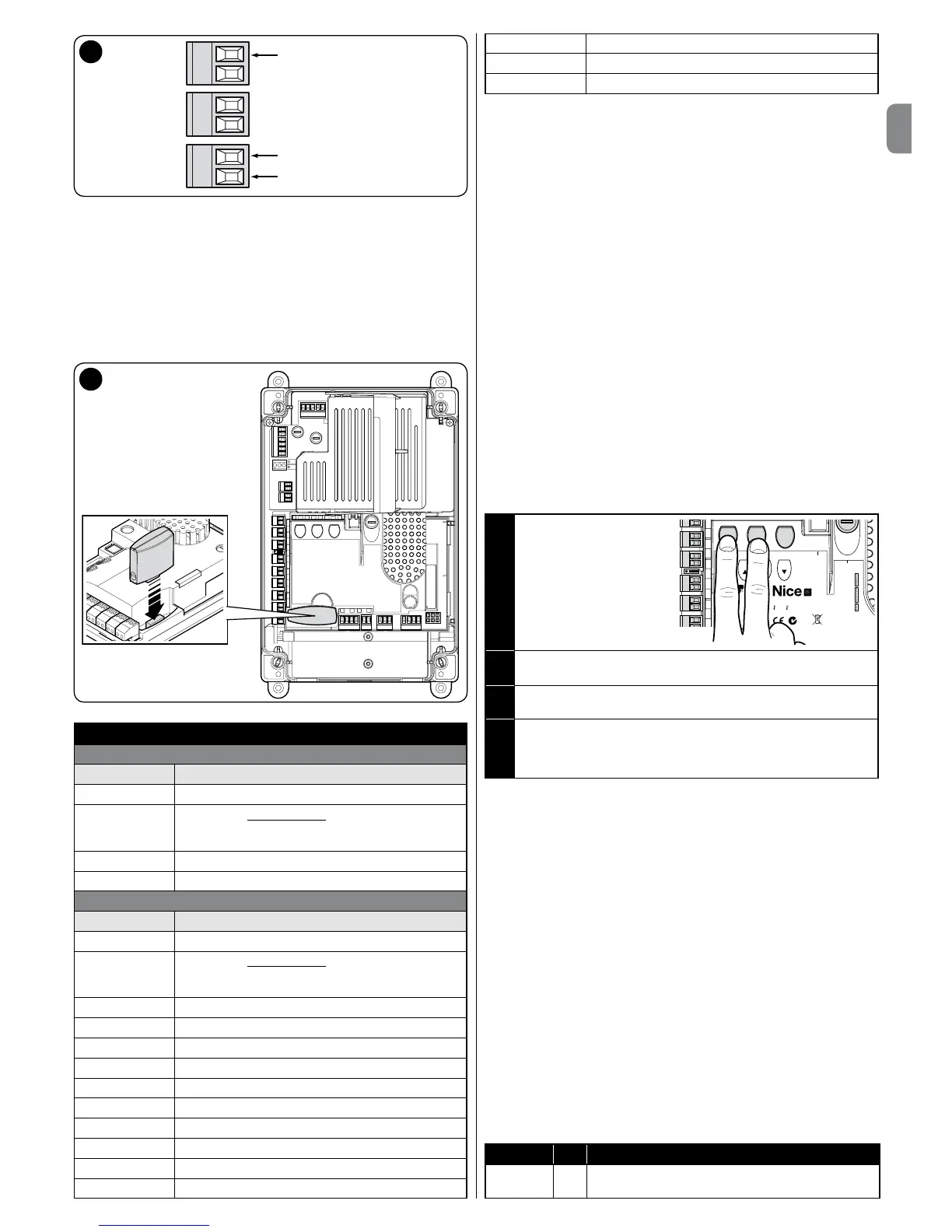
Para ejecutar el reconocimiento de los dispositivos, proceder de la siguiente
manera:
01. Pulsar y mantener pulsadas
simultáneamente las teclas
[Open] y [Set]
Open
Stop
Set
Close
L1 L2 L3 L4 L5 L6 L7 L8
BusT4
Fuse 3.15AF
Stop
OSE
8K2
PP
Open
Close
Flash
2
Bluebus
to push
buttons
to internal
control
to internal
brake
-20° C +55° C
DIC1
N19771
02. Soltar las teclas cuando los leds “L1” y “L2” comiencen a parpadear
rápidamente (a los 3 segundos aproximadamente).
03. Esperar unos segundos hasta que la central concluya el
reconocimiento de los dispositivos.
04. Al nalizar esta fase, el led del borne STOP debe estar encendido
y los leds “L1” y “L2” deben apagarse (podrían comenzar a
parpadear los leds “L3” y “L4” para indicar que no se ha ejecutado el
reconocimiento de las medidas).
Este procedimiento se debe repetir en caso de modicaciones.
en los dispositivos conectados a los bornes BlueBus y Stop (por
ejemplo, después de conectar un nuevo dispositivo a la central de
mando). La operación se debe realizar aun si se conecta un Inverter o
un motor con encoder.
3.13 - Reconocimiento de las posiciones de apertura y cierre
Una vez ejecutado el reconocimiento de los dispositivos conectados a la
central de mando (apartado 3.12), es necesario hacer reconocer a la central las
posiciones de apertura y cierre del portón.
¡ATENCIÓN! - Procedimiento para motores con nal de carrera electró-
nico: una vez ejecutado el reconocimiento de las posiciones de apertura y
cierre, es necesario ejecutar 3 maniobras completas. Durante la ejecución
de estas maniobras, el portón se acerca progresivamente a las posiciones
memorizadas anteriormente, hasta alcanzar aquellas programadas.
Seguir los procedimientos para los distintos tipos de motor:
- Motor con nal de carrera electrónico (encoder), ver el apartado 3.14;
- Motor con inverter familia MEIN, ver el apartado 3.15;
- Motor con nal de carrera mecánico, ver el apartado 3.16.
3.14 - Reconocimiento de las posiciones de apertura y cierre
con nal de carrera electrónico (encoder)
Es posible programar 3 posiciones, como se describe a continuación:
Posición Led Signicado
A1 L1 Medida de máxima apertura deseada. Cuando el por-
tón llega a esta posición, se detiene.

 Loading...
Loading...