5 Motion Control Parameters
5-16
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
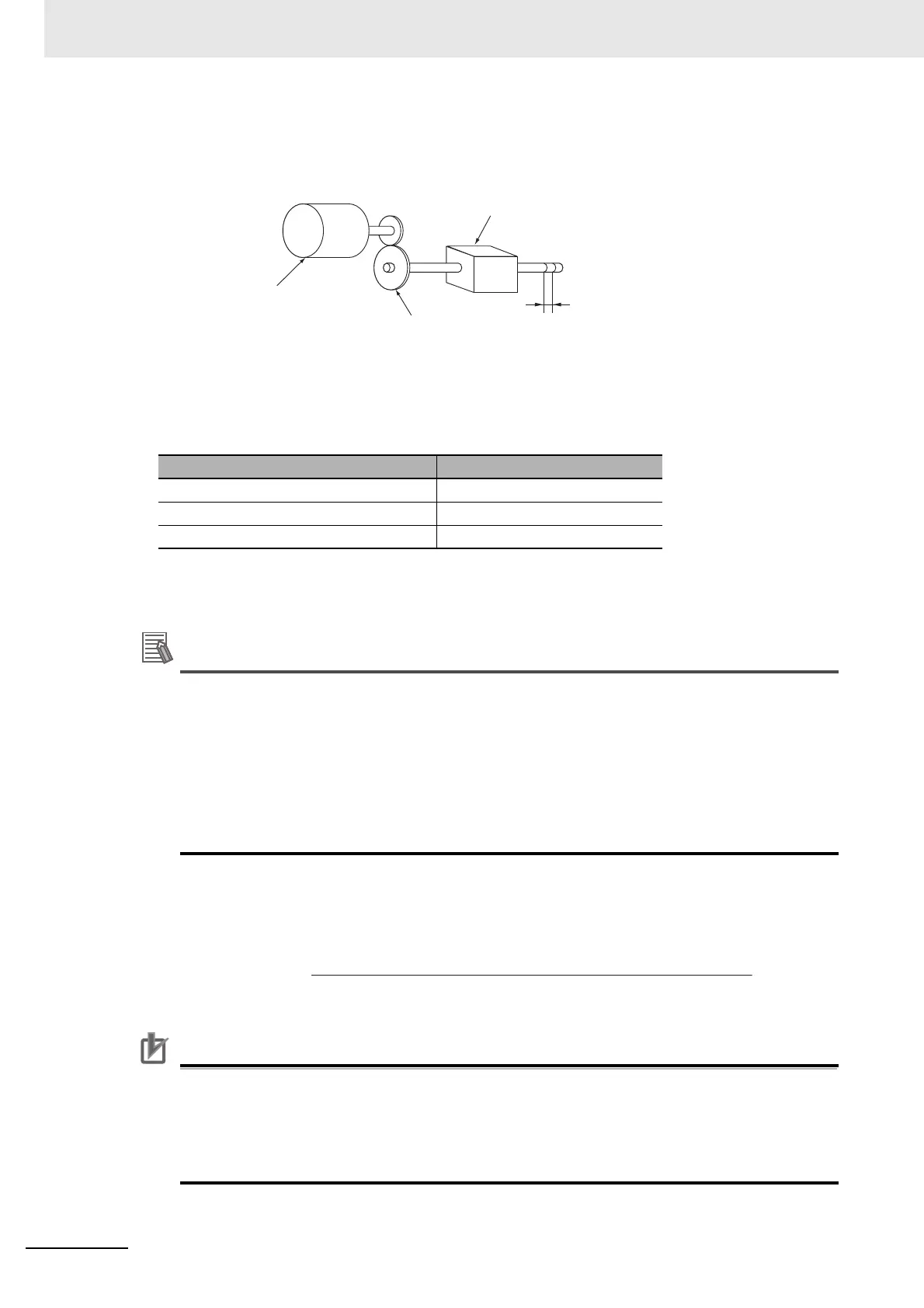
In this example, an OMRON 1S-series Servomotor with a 23-bit absolute encoder is used.
Mechanically, the reduction ratio of the reducer is 1/5 and the workpiece moves 10 mm for every
rotation of the ball screw.
The Unit of Display parameter is set to millimeters. The Command Pulse Count Per Motor Rotation
is set to the resolution of the encoder on the Servomotor.
A reducer with a reduction ratio of 1/5 is used, so the ball screw turns once for every five rotations of
the Servomotor. The workpiece moves 2 mm (10 mm × 1/5), so the Work Travel Distance Per Motor
Rotation is set to 2.
With these settings, the command unit for positions in the user program is 1 mm.
For example, to move to an absolute position of 100.5 mm, the Position (Target Position) input vari-
able to the MC_MoveAbsolute (Absolute Positioning) instruction is set to 100.5.
Parameter Settings for a Reduction Ratio of 1/9 for the Example
The travel distance of the workpiece for one rotation of the Servomotor is 10 mm × 1/9, or
1.1111... mm (a repeating decimal number).
For numbers that do not divide evenly, multiply the command pulse count per motor rotation and
the work travel distance per motor rotation by the same coefficient and set the parameters to the
results. Here, the reduction ratio is 1/9, so we use 9 as our coefficient.
• Command Pulse Count Per Motor Rotation: 75,497,472 (8,388,608 × 9)
• Work Travel Distance Per Motor Rotation: 10 (10 × 1/9 × 9)
When Using a Reducer and the Count Mode Is Linear Mode
When you set to use a reducer and the Count Mode is Linear Mode, the following calculation for-
mula is used to have the electric gear ratio.
Precautions for Correct UsePrecautions for Correct Use
The electronic gear converts units to the values that are used for positioning by the MC Func-
tion Module and motion control instructions.
Motion control instructions specify the target position as LREAL data. However, an instruction
error will occur if the command position after conversion to pulses by the electronic gear
exceeds 40 bits.
Parameter name Setting
Unit of Display mm
Command Pulse Count Per Motor Rotation 8,388,608
Work Travel Distance Per Motor Rotation 2
Ball screw pitch: 10 mm
Workpiece
Servomotor encoder
resolution: 23 bits/rotation
(8,388,608 pulses per rotation)
Reduction ratio: 1/5
Electronic gear ratio =
Command Pulse Count Per Motor Rotation
× Motor Gear Ratio
Work Travel Distance Per Rotation
× Work Gear Ratio

 Loading...
Loading...







