Appendices
A-4
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
This section describes mapping PDOs to control servo axes from the MC Function Module.
To use motion control functions, you must map the objects that are required for those functions to
PDOs.
The PDO map is a list of required objects that is prepared in advance.
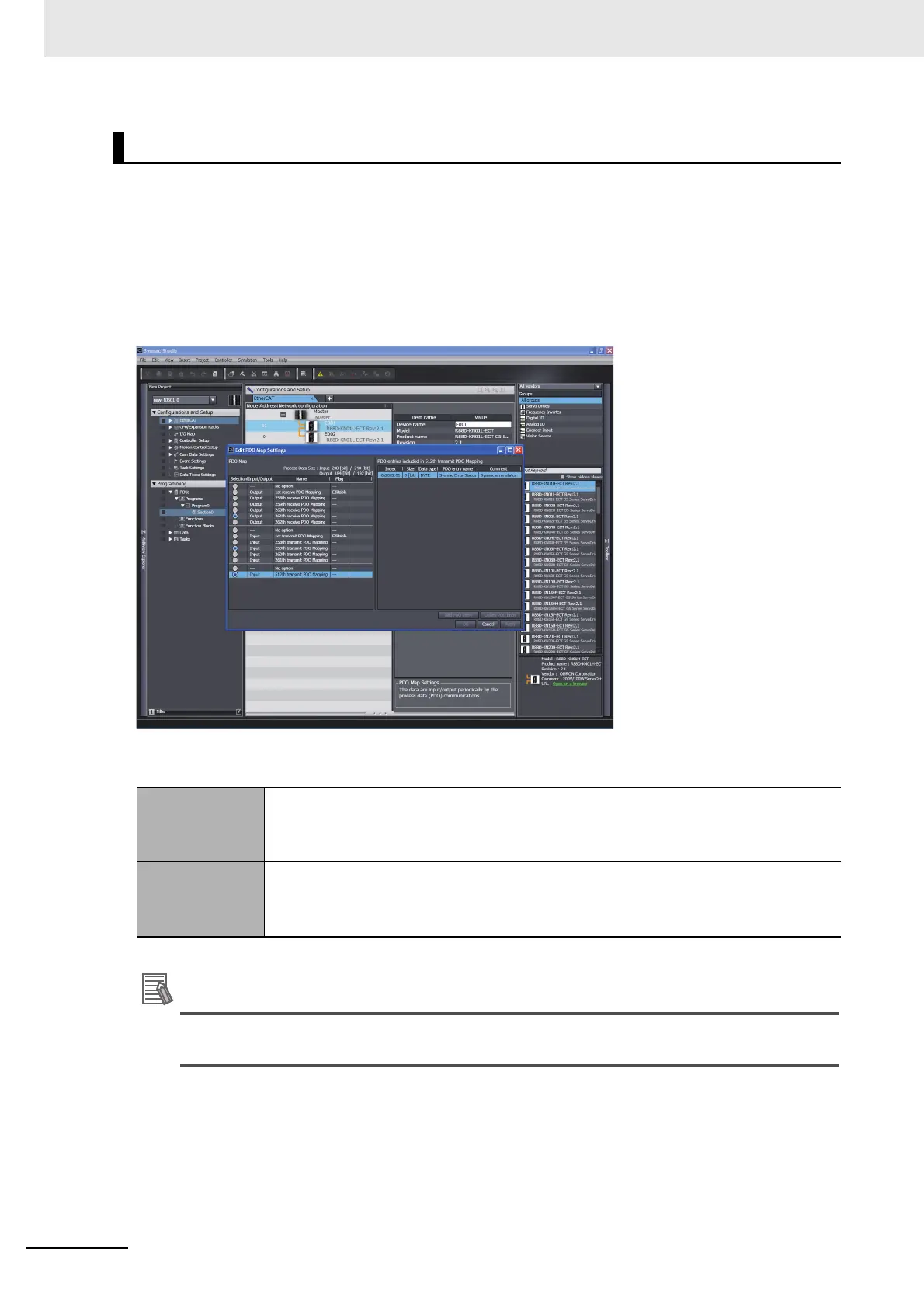
You select the PDOs to use in the Edit PDO Map Settings Window of the EtherCAT Tab Page in the
Sysmac Studio.
The following PDOs are mapped by default in the Sysmac Studio.
• If you use the recommended OMRON Servo Drives (R88D-1SN-ECT), then it is not nec-
essary to change the default PDO map on the Sysmac Studio.
PDO Mapping
RxPDO: 261th
Receive PDO
Mapping (1704
hex)
Controlword (6040 hex), Target Position (607A hex), Target Velocity (60FF hex), Target
Torque (6071 hex), Modes of Operation (6060 hex), Touch Probe Function (60B8 hex), Max
Profile Velocity (607F hex), Positive Torque Limit Value (60E0 hex), and Negative Torque
Limit Value (60E1 hex)
TxPDO: 259th
Transmit PDO
Mapping (1B02
hex)
Error Code (603F hex), Statusword (6041 hex), Position Actual Value (6064 hex), Torque
Actual Value (6077 hex), Modes of Operation Display (6061 hex), Touch Probe Status
(60B9 hex), Touch Probe Pos1 Pos Value (60BA hex), Touch Probe Pos2 Pos Value (60BC
hex), and Digital Inputs (60FD hex)

 Loading...
Loading...







