Appendices
A-6
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
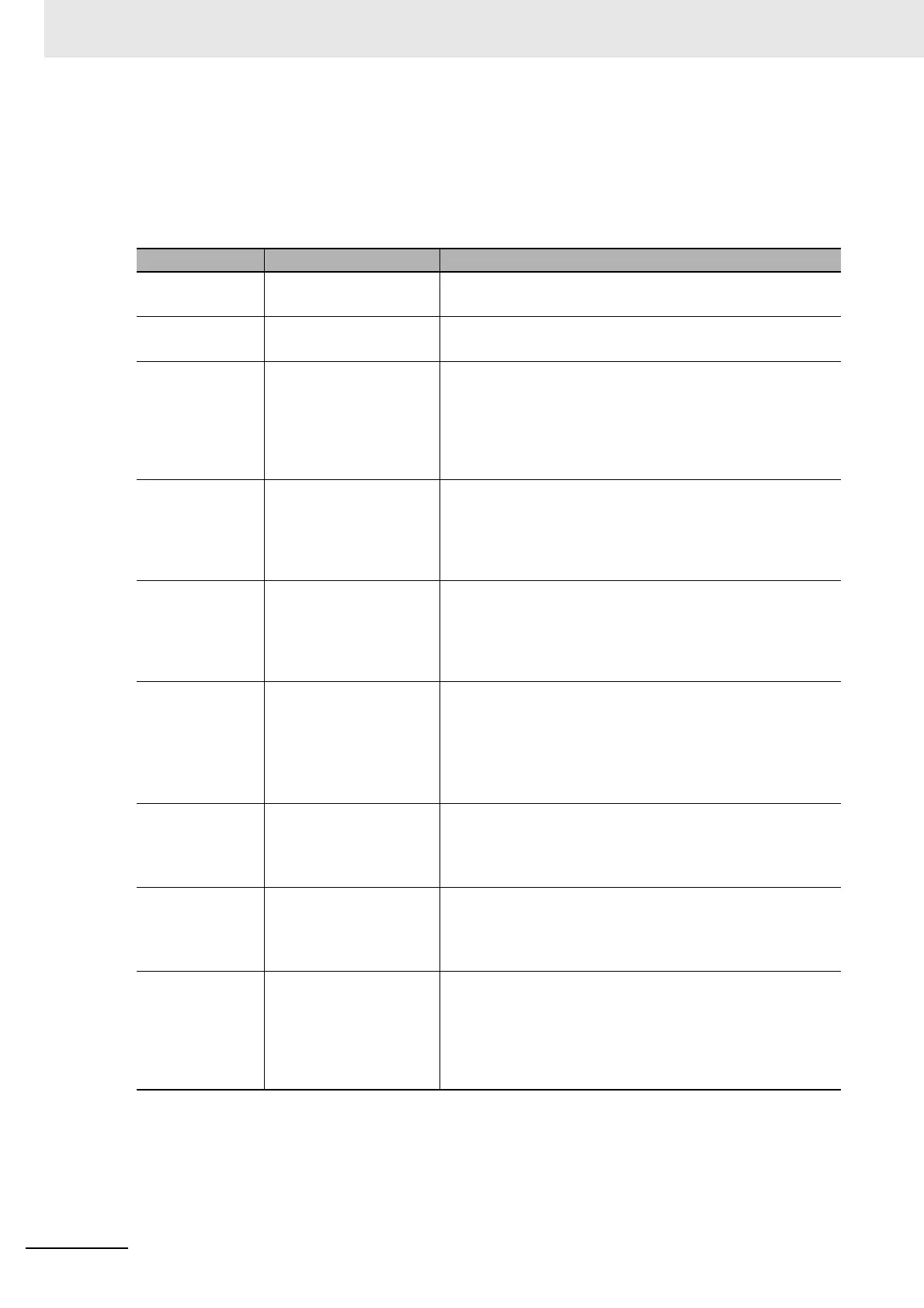
Output Settings (Controller to Servo Drive)
The input settings apply to the command data that is sent from the MC Function Module to the Servo
Drive.
The default settings in the Sysmac Studio are listed in the following table. (Required objects are
marked with a star.)
*1 If you set 6060 hex (Modes of Operation), also set 6061 hex (Modes of Operation Display). Normal operation
is not possible if only one of these two is set.
Function name Process data Description
Control word 6040 hex-00.0
(Controlword)
This data is used to control the status of the Servo Drive.
Set 6040 hex: Controlword.
Target posi-
tion
607A hex-00.0
(Target position)
The target position for position control.
Set 607A hex: Target position.
Target veloc-
ity
60FF hex-00.0
(Target velocity)
The target velocity for velocity control.
This object is necessary to output to the Servo Drive in Cyclic
Synchronous Velocity Control Mode by the MC_SyncMoveVe-
locity (Cyclic Synchronous Velocity Control) and other instruc-
tions.
Normally set 60FF hex: Target velocity.
Target torque 6071 hex-00.0
(Target torque)
The target torque for torque control.
This object is necessary to output to the Servo Drive in Cyclic
Synchronous Torque Control Mode by the MC_TorqueControl
(Torque Control) and other instructions.
Normally set 6071 hex: Target torque.
Max profile
velocity
607F hex-00.0
(Max profile velocity)
The velocity limit value for torque control.
This object is necessary for velocity control in Cyclic Synchro-
nous Torque Control Mode by the MC_TorqueControl (Torque
Control) and other instructions.
Normally set 607F hex: Max profile velocity.
Modes of
operation
6060 hex-00.0
(Modes of operation)
This data is required to change the control mode.
This object is necessary to change to a control mode other
than Cyclic Synchronous Position Control Mode for the
MC_SyncMoveVelocity (Cyclic Synchronous Velocity Control),
MC_TorqueControl (Torque Control), and other instructions.
Normally set 6060 hex: Modes of operation.
*1
Positive
torque limit
value
60E0 hex-00.0
(Positive torque limit
value)
This is the torque limit value in the positive direction.
This object is necessary to control the output torque of the
Servo Drive by the MC_SetTorqueLimit and other instructions.
Normally set 60E0 hex: Positive torque limit value.
Negative
torque limit
value
60E1 hex-00.0
(Negative torque limit
value)
This is the torque limit value in the negative direction.
This object is necessary to control the output torque of the
Servo Drive by the MC_SetTorqueLimit and other instructions.
Normally set 60E1 hex: Negative torque limit value.
Touch probe
function
60B8 hex-00.0
(Touch probe function)
This data is used to control the touch probe function.
It is required for the touch probe function for the MC_Home,
MC_HomeWithParameter, MC_MoveFeed (Interrupt Feeding),
MC_TouchProbe (Enable External Latch), MC_MoveLink (Syn-
chronous Positioning), and other instructions.
Normally set 60B8 hex: Touch probe function.

 Loading...
Loading...







