Appendices
A-38
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
Use Sysmac Studio version 1.09 or higher when you use the functions that were added or changed for
the CPU Unit with unit version 1.08.
*1 This function is independent of the version of the CPU Unit. Using the Sysmac Studio version 1.09 or higher
allows you use this assignment function.
Version 1.10 or higher of the Sysmac Studio is required to use the functions that were added for unit
version 1.09 of the CPU Unit.
No motion control functions were added for unit version 1.09, but the specifications of some instructions
were improved. Refer to the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No.
W508) for version information on the motion control instructions.
Version 1.12 or higher of the Sysmac Studio is required to use the following functions that were added
for unit version 1.10 of the CPU Unit.
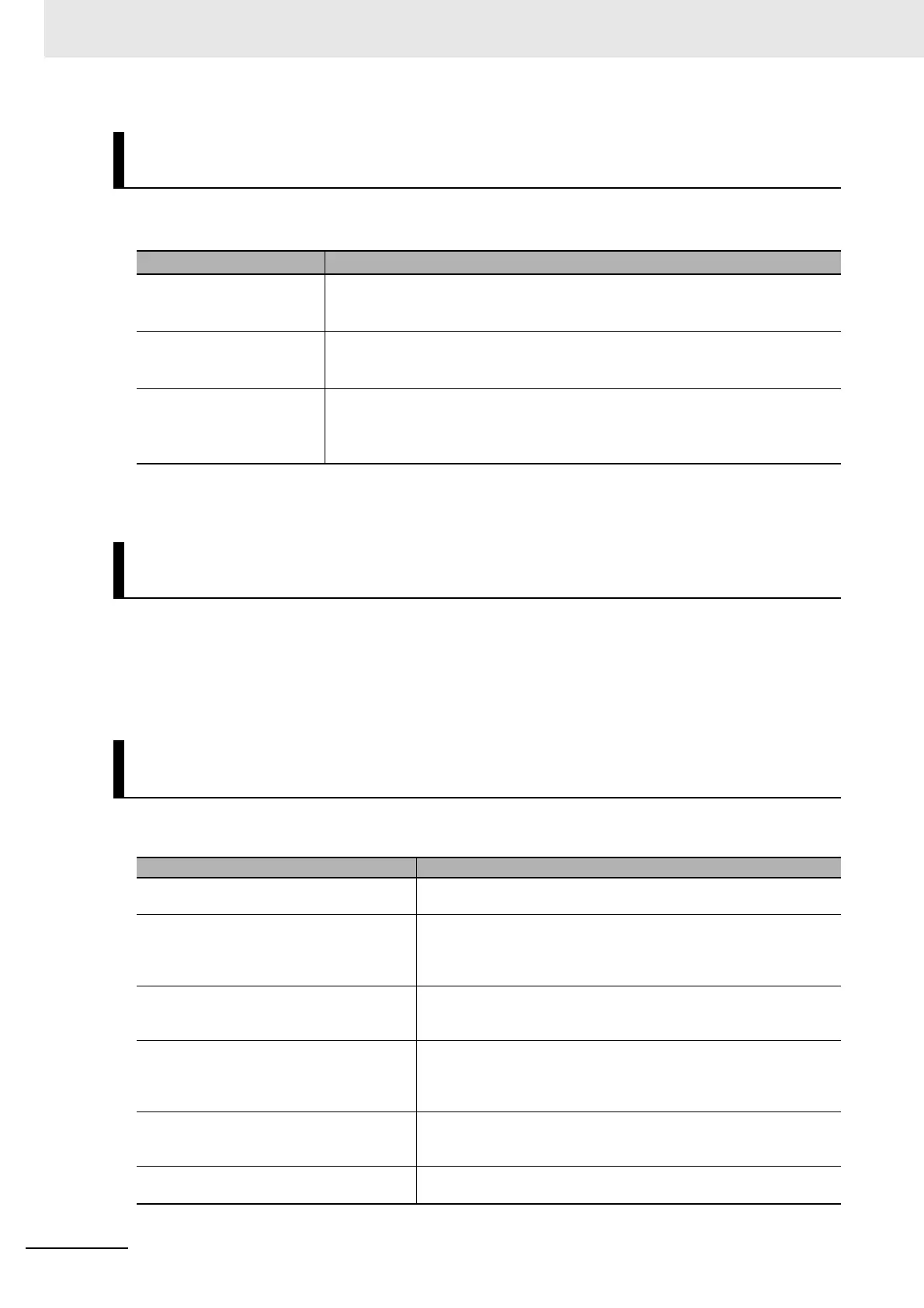
Motion Control Functions That Were Added or Changed for Unit
Version 1.08
Function Overview
Generating cam tables You can use the MC_GenerateCamTable (Generate Cam Table) instruction and
generate the cam table according to the cam property and cam node specified for
the input parameters.
Changing axis parameters You can access and change the axis parameters from the MC_WriteAxisParameter
(Write Axis Parameters) instruction and the MC_ReadAxisParameter (Read Axis
Parameters) instruction in the user program.
Assigning device variables You can assign the device variables to the I/O ports of slaves and Units that are
assigned to the Axis Variables.
*1
Refer to 2-4-2 Relationship between EtherCAT Master Function Module
and MC Function Module
for details.
Motion Control Functions That Were Added or Changed for Unit
Version 1.09
Motion Control Functions That Were Added or Changed for Unit
Version 1.10
Function Overview
Slave axis position compensation This function compensates the position of the slave axis currently
in synchronized control.
Change in the blending operation The maximum acceleration/deceleration rate is used and the
blending operation is continued even if you set the Accelera-
tion/Deceleration Over parameter to Use rapid acceleration/decel-
eration. (Blending is changed to Buffered.) or Minor fault stop.
Home definition timing for absolute encod-
ers
In addition to the existing home definition timing, home is also
defined when EtherCAT slave process data communications
change from a non-established to an established state.
Current position when process data com-
munications are in a non-established state
The actual current position and the command current position axis
variables will contain the actual current position output that is just
before process data communications change to a non-established
state.
With or without Modes of Operation (6060
hex) and Modes of Operation Display (6061
hex) mapping
The operation depends on whether Modes of Operation (6060 hex)
and Modes of Operation Display (6061 hex) are mapped.
PDS state control method You can set the state to which PDS state changes when Servo is
turned OFF by the MC_Power instruction.

 Loading...
Loading...







