Encoder Parameters/Attributes
24 ATM60 / ATM90 / KHK53
Dec 2021
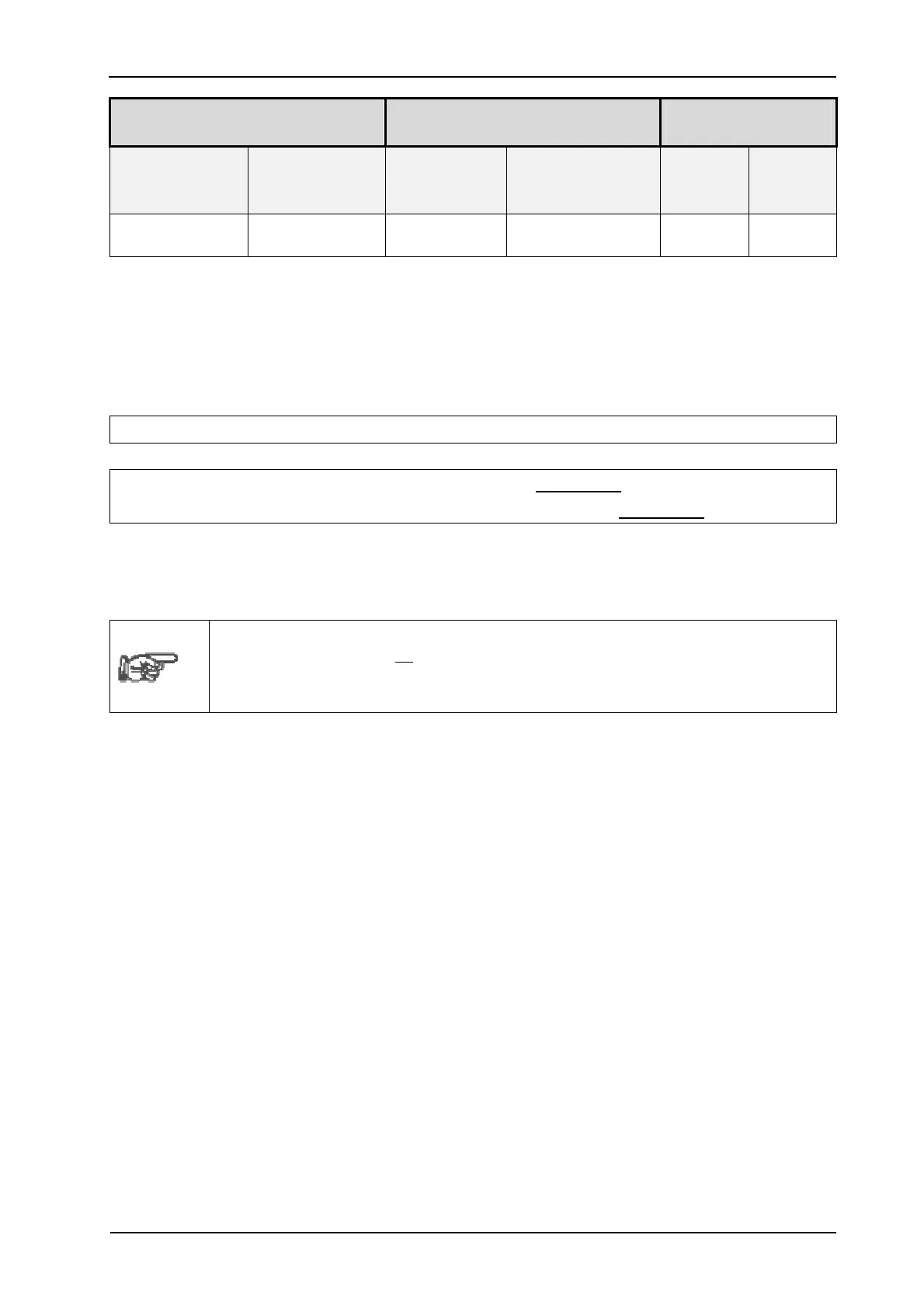
Customer-specified value Adapted values (device-side) ScF R = 2
N
CPR CMR CPR CMR
1,000
(x1)
67,108,864 1,000 8,192,000 1/n (*) 2
13
1,000
(x1)
67,108,863...
8,192,000
1,000 8,192,000 1/n (*) 2
13
1,000
(x1)
(8,192,000-1)...
4,096,000
1,000 4,096,000 1/n (*) 2
12
(*1)
Value is not 2
N
; thus, the scaling factor never gives an integer result.
Examples of the conversion to a scaled position value:
• physical position value (Pos_Phy): >>67,108,863<< (max. value)
Pos_Scal = (Pos_Phy x ScF) % CMR_a
(B1)
Pos_Scal = (67,108,863 x 1/2 ) % 16,777,216 = 16,777,215
(B2)
Pos_Scal = (67,108,863 x [2,730/ 8,192] ) % 22,364,160 = 22,364,159
This means that the max. physical position value supported by the encoder also corresponds
with the max. value within the scaled measuring range.
To operate a rotary encoder in 'Continuous Mode' (so-called rotary axis), CMR
must be a multiple (R = 2
N
) based on parameter 'CPR'. The device automatically
adapts the factor 'R' to the next possible lower value.
Factor R (N = 0,1,...13) is limited to 8192 (max. number of revolutions).