Closed-loop thyristor current control
5-30 System- and communication configuring D7-SYS - SIMADYN D
Edition 06.2002
5.2.4 CAV, current actual value sensing
Hardware address
Typ. current: Sito
Motor current
Normalization
Offset calibration [kHz]
Inv. stability limit, current-dependent
Correction for YAU
Pos.V. correct. act. value sensing
Neg.V. correct. act. value sensing
Max. current M1 (abs. value)
Max. current M2 (abs. value)
M1 operational
M2 operational
Handshake EMF
GV
R
R
R
R
R
R
R
R
R
R
BO
BO
BO
D
RRC
RC
NF
XFO
XF2
IAV
L1
L2
CX1
CX2
IM1
IM2
CI
CAV
YC
YFI
YFO
YAU
TCC
ACO
QSF
R
R
R
R
TS
BO
W
Current actual value
Frequency V/f conversion [kHz]
Offset actual value [kHz]
Inv. stability limit, current-dependent
Measuring time, current act. value
Handshake PC6
Fault
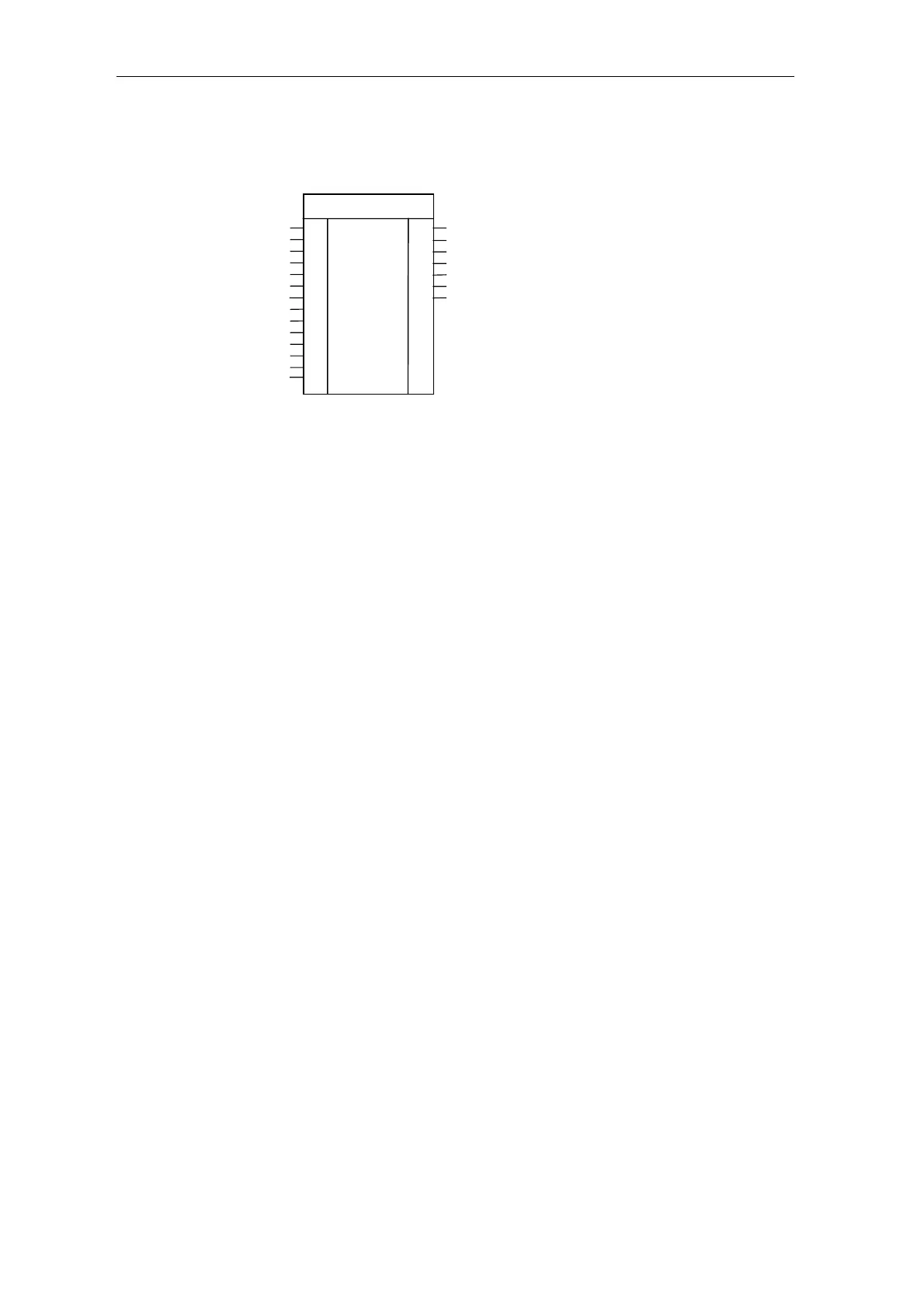
Fig. 5-13 CAV represented in the CFC
Using the function block FB–CAV (Current Actual Value), the current
actual value is determined and output at CAV.YC.
The current actual value is either converted into a voltage at a shunt or
using AC current converters in the drive converter and then converted
into a frequency. This measured frequency is transferred to the ITDC
where it is measured in the hardware.
The mapping range of the current actual value is
±10[V] = 2* rated current, corresponding to ±30[kHz].
The frequency at zero current is 60[kHz].
The average current actual value is determined from the number of pulse
edges of the frequency and the time between two firing pulses.
The “Typical DC current” of the drive converter should be entered at input
CAV.RRC.
The SITOR sets 6QG2x/6QG3x are equipped as standard, so that the
frequency of the V/f converter is increased by 15 kHz at the typical DC
current. At the test socket: Iact is output as 5V.
The rated system/motor current [A] should be specified at input
CAV.ARC. All of the current-dependent thyristor current control quantities
refer to this value.
If the current actual value exceeds the limits set at inputs CX1 or CX2,
then an "Overcurrent Mx" fault message is output which causes a trip at
the FB SOL (standard), or, depending on what has been configured, only
an alarm is generated.
If the V/f conversion manifests a gain error, this can be corrected, within
limits using the data at CAV.AL1 /AL2.
The absolute value at CAV.AL1 acts on positive values and the input
CAV.AL2, correspondingly for negative values. The thus corrected actual
value is provided at CAV.YC.
Function
Limits
Gain error