IRUEHDULQJOHVVIUDPHVXSSRUWHGURWDWLQJXQLRQ
IRUURWRUVXSSRUWHGURWDWLQJXQLRQ
7KLVD[LDOIRUFHPXVWEHDGGHGWRRUVXEWUDFWHGIURP)F
S
GY
'Y
˭
Y
)
)
)Y
D[
)ෙದ)
G
'
˭
)
S
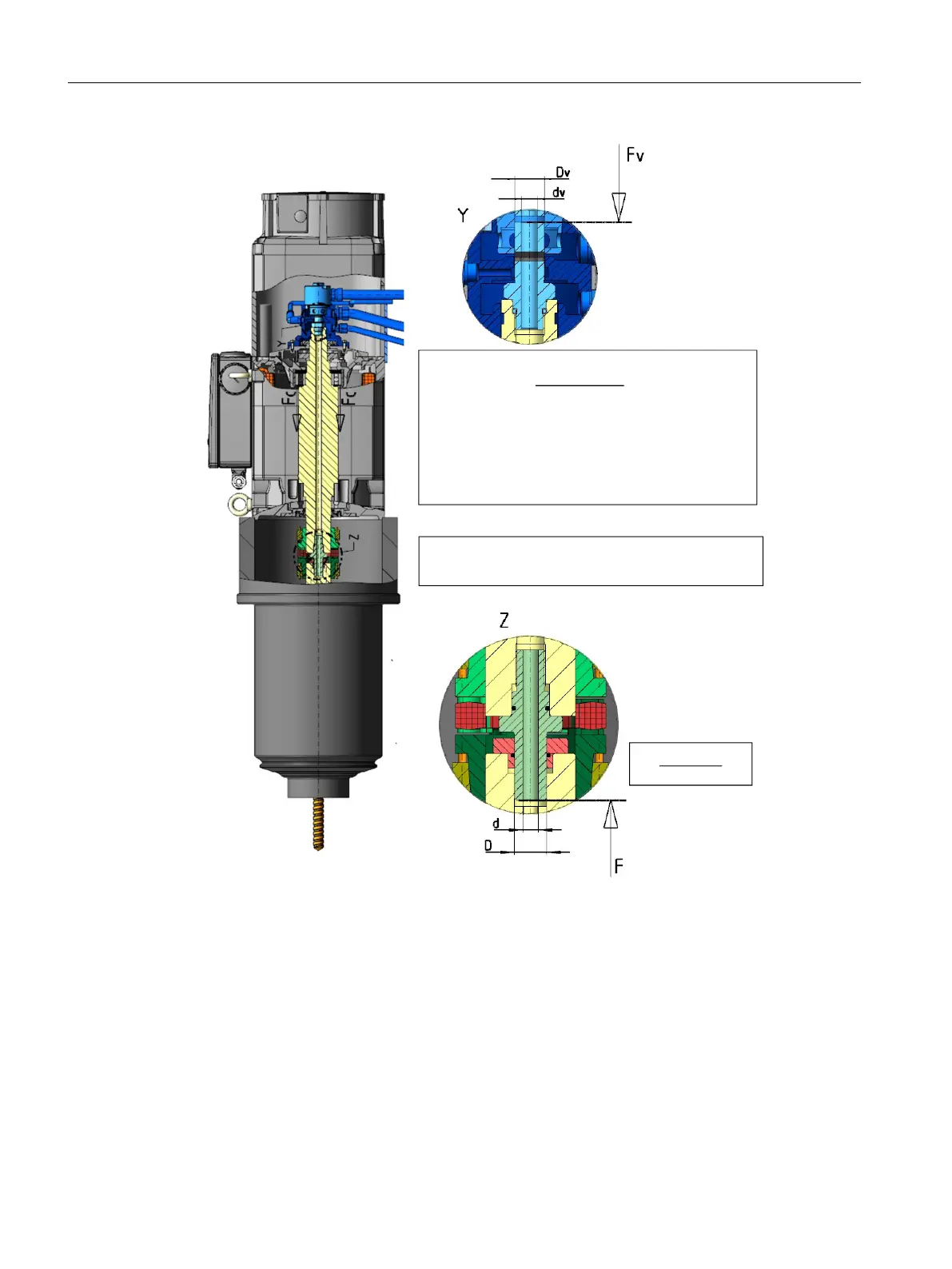
Figure4-11 Mounting the rotating union
Figure "Mounting the rotating union," illustrates how an axial force arises due to joint
pressure, for example, in the gap between the motor shaft (hole bolt) and the spindle shaft.
This acts upon the motor shaft against the bearing preloading force F
c
. This reduces or even
eliminates the preloading force of the motor bearing.
For bearingless, frame-supported rotating unions, axial forces can also arise depending on
the internal diering hole diameters. These act against the forces from the joint, so they
have a smaller eect on the bearing preloading force. Ensure that the axial forces from the
rotating union are greater than those from the joint (see case 1 in the graphic). This has
the advantage that the bearing preloading force remains unchanged. The bearing preloading
force is important for non-slip running of the motor bearing and must not be eliminated.
Mechanical properties
4.6Mounting of rotating unions on 1PH8 hollow-shaft motors
1PH8 SIMOTICS M main motors
98 Conguration Manual, 12/2022, A5E51895839A