4.4 Types of bearing
4.4.1 Drive output types and bearing versions
1PH8 motors are suitable for coupling output and belt coupling. The bearing versions and their
applications are summarized in the following table.
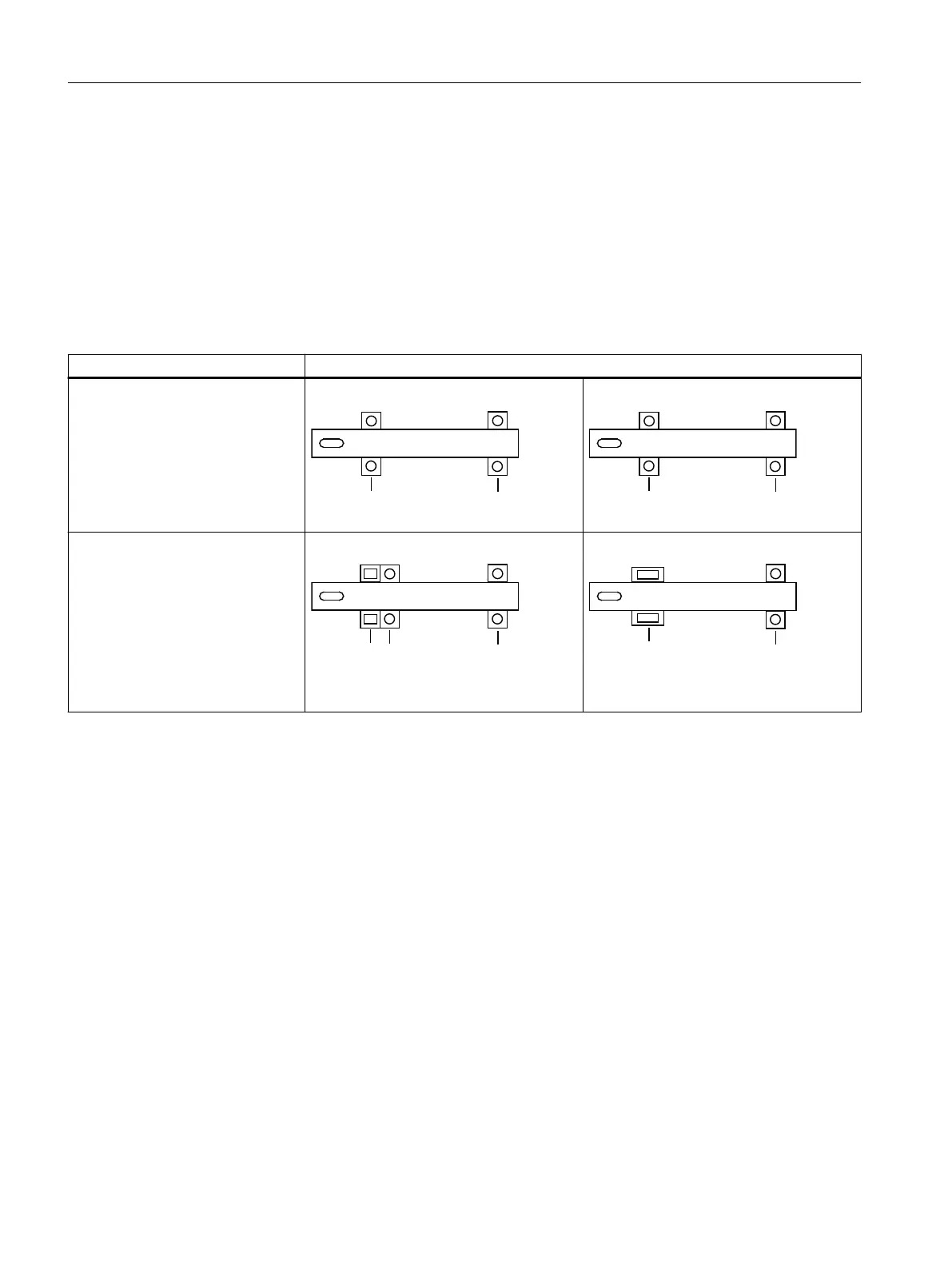
Table 4-15 Drive output type with the appropriate bearing design
Application Bearing version
• Coupling output
• Planetary gearboxes, low radial
forces
SH 80 to 160
SH 180 to 280
• Belt coupling with normal radial
force
• Pinion output with
straight teeth
• Belt coupling with increased ra‐
dial force
SH 100 to 160
SH 180 to 280
1)
Deep-groove ball bearing
2)
Cylindrical-roller bearings (only in versions for increased radial forces - 14th data position = E or F)
3)
For the bearing version G or H as a oating bearing (as for 1PH7); all other bearing types have a location bearing at the drive
end - 14th data position = A, B, C, D, F, L, M, P, Q, or N
4)
Version as a location bearing
Mechanical properties
4.4Types of bearing
1PH8 SIMOTICS M main motors
86 Conguration Manual, 12/2022, A5E51895839A

 Loading...
Loading...








