Simrad CS66
80 20221859 / F
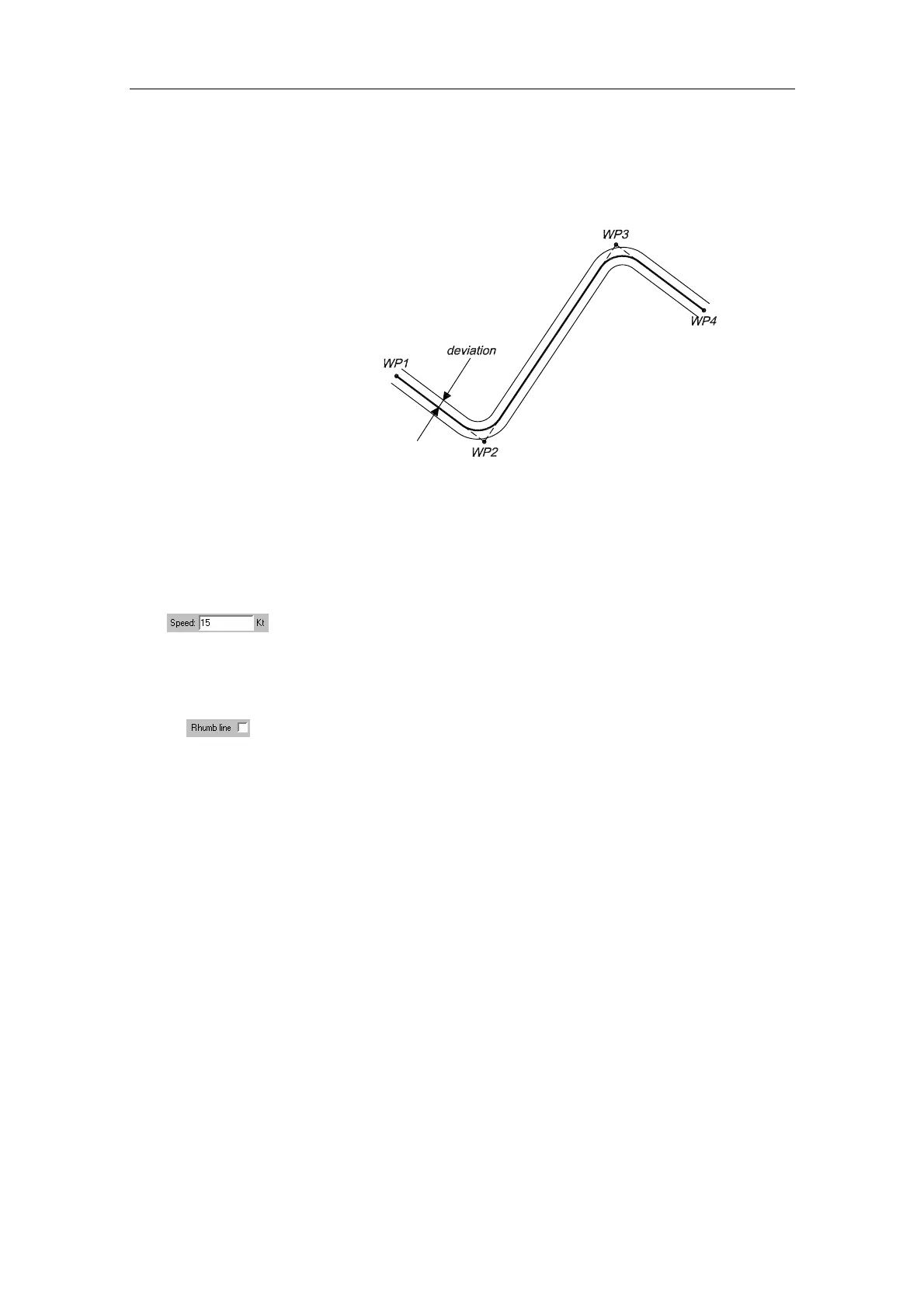
Deviation
This parameter defines the vessel’s offset distance from leg
before an alarm is given.
The deviation may be set individually for each leg in the route.
Refer Modifying a route by using the Waypoint dialog, page
89.
Speed
This is the speed used by the CS66 system for calculating
estimated time for the route.
Rhumb line
Option for selecting Rhumb Line computation when calculating
the distance between two waypoints.
If the checkbox not is activated Great Circle computation will be
used.
Rhumb lines are tracks of constant bearing. It is possible to travel
between two locations using Rhumb line computation but the
distance would usually be greater than if Great circle is used.
The great-circle route is the shortest path between two points.
However, if you are to travel along such a route, it would be
difficult to steer manually as the heading would constantly be
changing (except in the case of due north, south, or along the
equator).