Navigating with the autopilot
When you start navigation on a system with autopilot functionality,
you are prompted to set the autopilot to navigation mode.
If you choose not to engage the autopilot, the autopilot can be set
to navigation mode from the Autopilot Controller later on.
For more information about autopilot functionality, refer to "Autopilot"
on page 57.
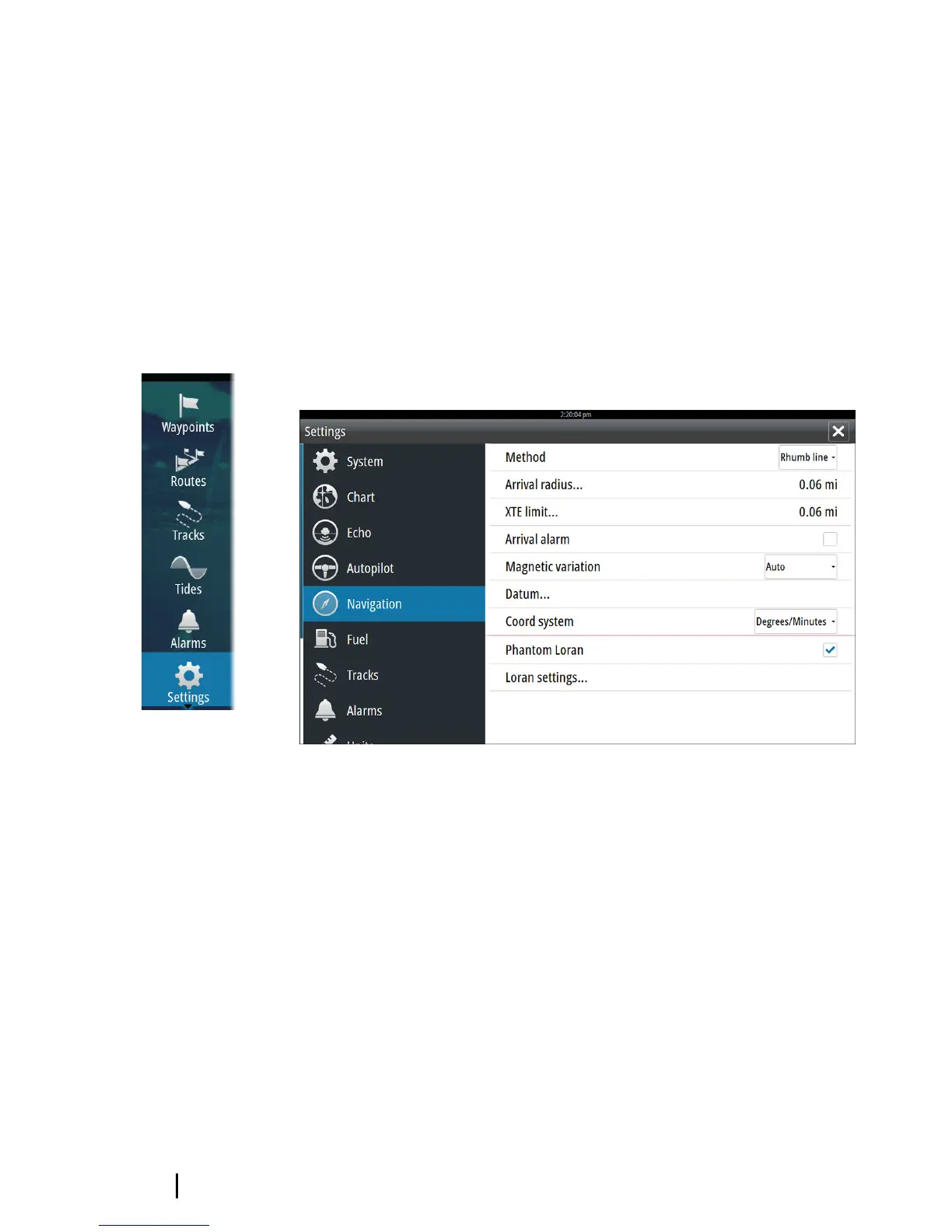
Navigation settings
Navigation method
Different methods are available for calculating the distance and
bearing between any two points on a chart.
The Great circle route is the shortest path between two points.
However, if you are to travel along such a route, it would be difficult
to steer manually as the heading would constantly be changing
(except in the case of due north, south, or along the equator).
Rhumb lines are tracks of constant bearing. It is possible to travel
between two locations using Rhumb line computation, but the
distance would usually be greater than if Great circle is used.
54
Navigating | GO7 Operator Manual