3D Accuracy - Positioning accuracy estimation for the last measurement (single measurement) Mean 3D STD - Standard deviation of the
accuracy after Survey-In process started
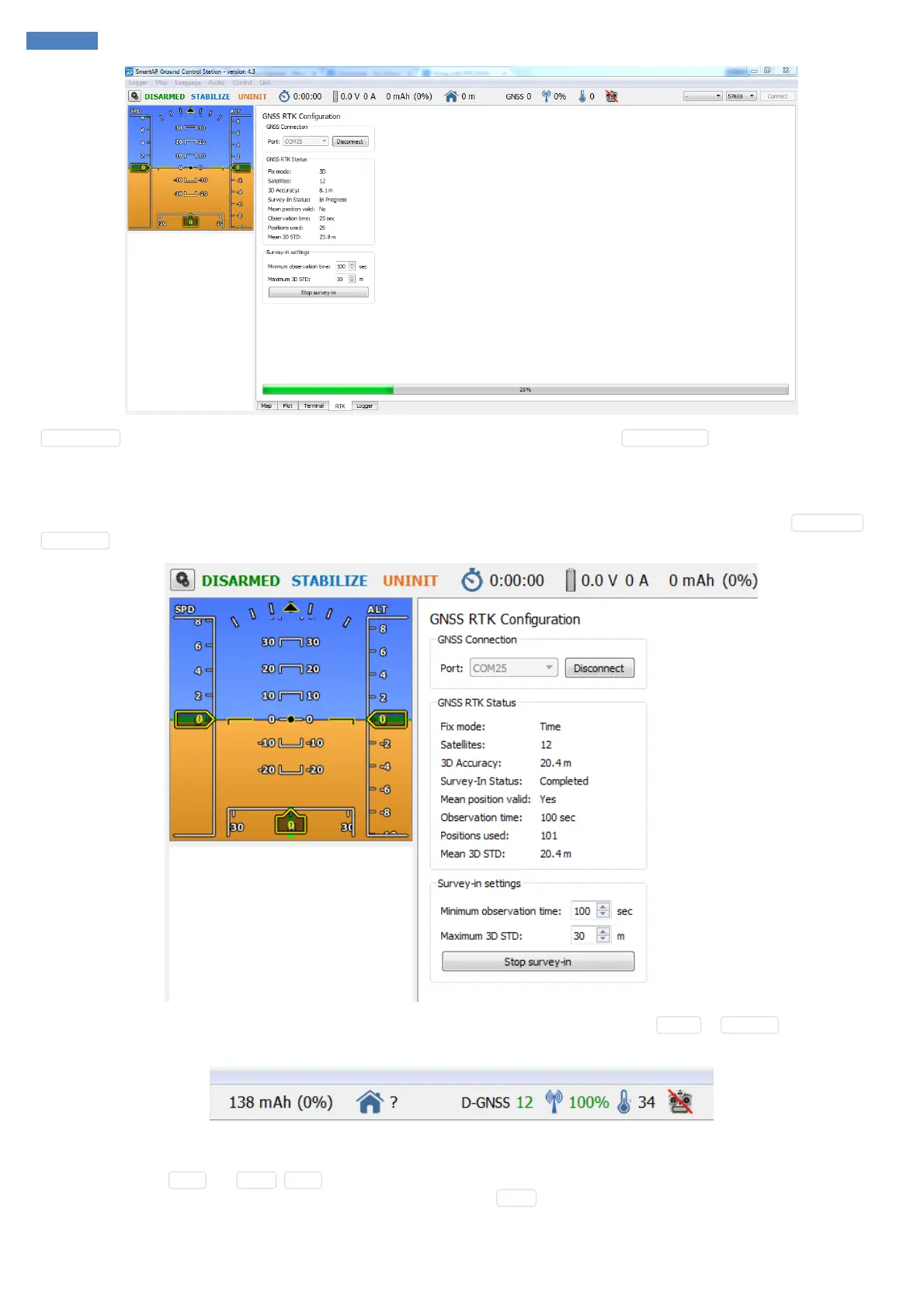
Survey-In completed
After Survey-In process is completed SmartAP GCS will start sending corrections to the Rover. Survey-In status will change from In Progress to
Completed .
If you take a look at the GNSS status of the vehicle shown on the top panel you'll notice the change from GNSS to D-GNSS meaning that the
Rover module gets corrections. D-GNSS mode becomes active after a few seconds since the base station module starts sending corrections.
RTK Modes
RTK has two modes: Float and Fixed . Float mode is easier to reach, usually it becomes available in 30-60 seconds after D-GNSS mode is
active, however, it's less accurate. Later, the system will automatically go to Fixed , accuracy will be higher but the process might take some
time.