- 51 -
5.6.1 Positioning Mode
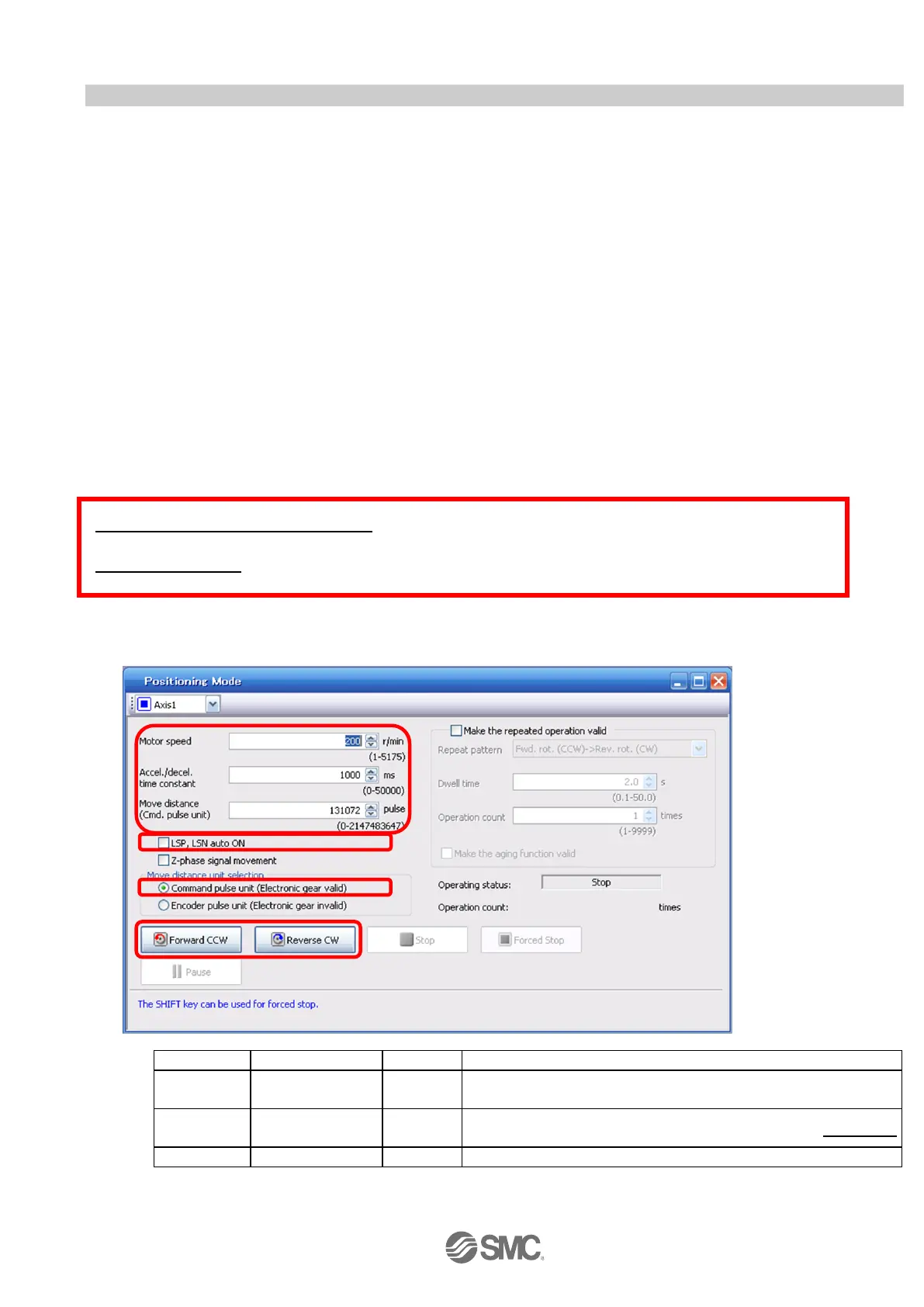
① In order to prevent accidental impact at the end of the stroke, operate the actuator at a low speed initially.
When changing speed or movement, increase the values whilst checking operation (Change
motorspeed, acceleration/deceleration time, movement distance values if required).
See “LECSA Operation Manual (Simplified Edition)”,section 5.6.2 for motorspeed configuration.
See “LECSA Operation Manual (Simplified Edition)”, section 5.6.3 for acceleration/deceleration time
configuration.
See “LECSA Operation Manual (Simplified Edition)”, section 5.6.4 for move distance configuration.
② Actuator positioning operates using [Forward (CCW)] and [Reverse (CW)].
(Check wiring and parameters if operation cannot be performed correctly).
When performing positioning operation in the setup software, the rotation direction of the actuator does not
change if you change the setting of parameter PA14 (Rotation direction selection). The actuator moves in the
direction of [Forward (CCW)] button and [Reverse (CW)] button.
③ Check the command impulse unit (electronic gear enabled).
The electronic gear duty set to PA05/PA06/PA07 will be enabled.
See “LECSA Operation Manual (Simplified Edition)”, section 5.3.4 – “Parameter Values by Actuator
Model” for PA05/PA06/PA07 settings for each actuator.
If PA05/PA06/PA07 are set to the values in “LECSA Operation Manual (Simplified Edition)”, section
5.3.4– Parameter Values by Actuator Model, the travel distance of the actuator per 1 pulse will be
calculated as follows.
【Position control mode (pulse input)】
・ travel distance of the actuator per 1 pulse = 10[μm] ( 0.01[mm])
【Positioning mode】
・ travel distance of the actuator per 1 pulse = 1[μm] ( 0.001[mm])
④ If the “Stroke-end” (LSP, LSN) signal is not configured as ON, an alarm may occur. (When checked,
the “stroke-end” (LSP, LSN) will be automatically turned ON only when this window is open.)
 Loading...
Loading...