5-41
S-curve time constant of the Internal Position Command
S-curve time constant generator can smoothen the command, it provides continuous speed and
acceleration, which not only is better the motor characteristic of acc/dec but also helps the motor to
operate more smoothly in machinery structure.S-curve time constant generator is only applicable to the
mode of internal position command input. When position command input switch to external position
pulse, the speed and acceleration are already constant, so it doesn’t use the S-curve time constant
generator.
Parameter
Signal
Name Default Unit
Setting
range
Control
mode
S-Curve Time Constant for Internal Position command(TSL)
Pn322
S-curve time constant generator can smoothen the command, it
provides continuous speed and acceleration which not only better
the motor characteristic of acc/dec but also helps the motor to
operate more smoothly in machinery structure.S-curve time
constant generator is only applicable to the mode of internal
position command input. When position command input switch to
external position pulse, the speed and acceleration are already
constant, so it doesn’t use the S-curve time constant generator.
Notice!
1. Setting rule:Pn323(TACC)≧Pn322(TSL)。
2. When Pn322 = 0,S-Curve time constant disabled.
0 x0.4ms
0
│
5000
Pi
S-Curve Time Constant for Internal Position command(TACC)
Pn323
Please refer to Pn322 statament
1 x0.4ms
1
│
5000
Pi
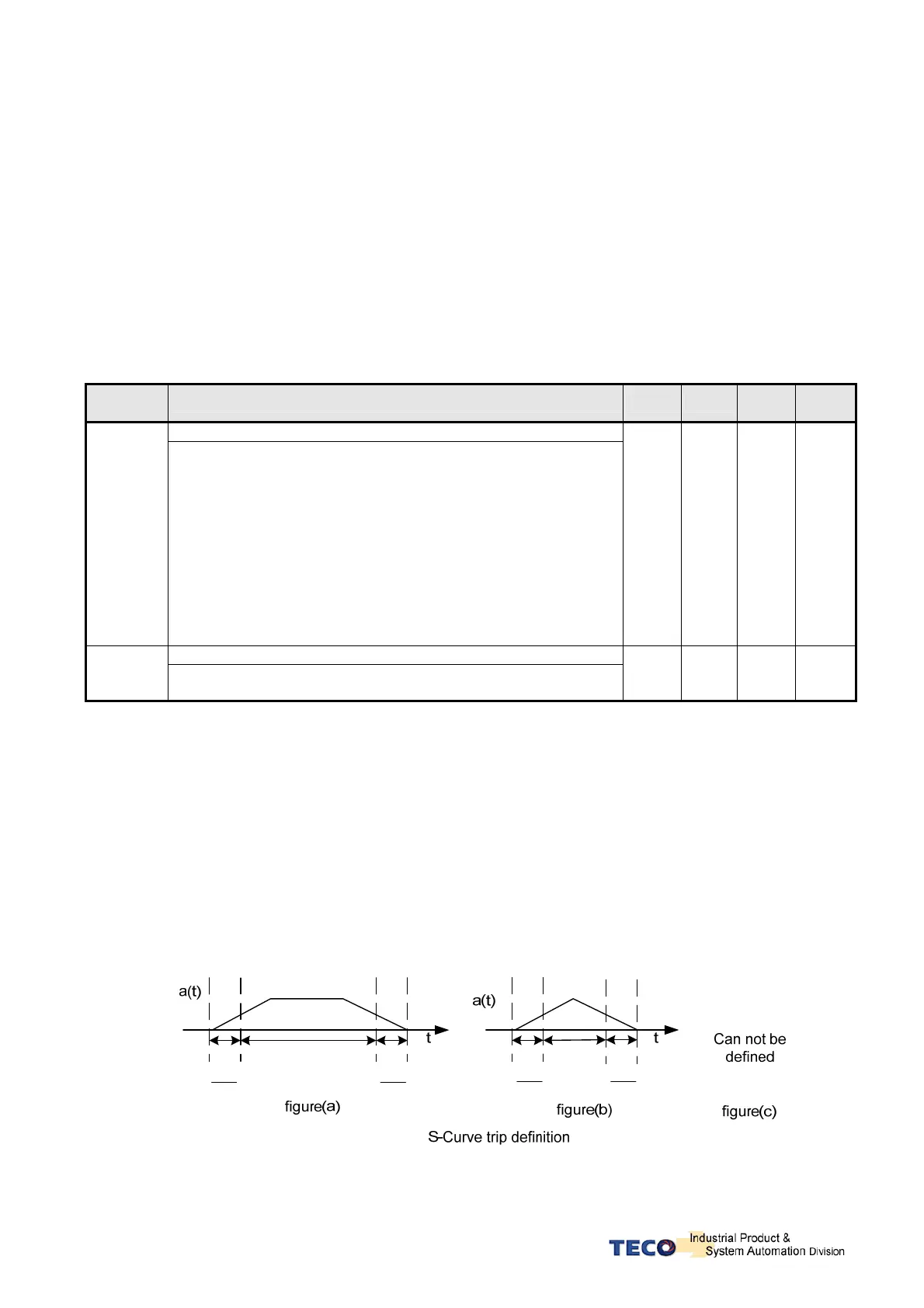
We define the input time parameter are TSL and TACC. It judges the acc/dec trip by the setted
time parameter.
Figure (a) shows that when TACC > TSL, it will generate a constant acceleration region, and the
time of acceleration is TACC – TSL.
Refer to figure (b), there is no constant acceleration region when TACC = TSL, and it can not be
define on TACC<TSL.
2
T
SL
2
T
SL
2
T
SL
2
T
SL
ACC
T
ACC
T
SLACC
TT <
SLACC
TT
SLACC
TT >

 Loading...
Loading...
