5-43
5-4-5 Definition of Direction
In position mode, user can use Pn314 (Position Command Direction Definition) to define motor
rotation direction. The setting is showed as follow:
Parameter
Signal
Name Setting Description
Control
Mode
0 Clockwise (CW)
★
Pn314
Definition of position
command direction (from
motor load end)
CCW
CW
1 Counter Clockwise (CCW)
Pi
Pe
New setting will become effective after re-cycling the power.
5-4-6 Gain Adjustment
z The table below shows the parameters for adjusting the position loop.
z Two position loop gains can be selected from input contact terminals according to
table below.
z For selection methods refer to section. 5-3-11.
Parameter
Signal
Name Default Unit Setting Range
Control
Mode
Pn310 Position Loop Gain1 40 1/s 1~1000 Pe/Pi
Pn311 Position Loop Gain 2 40 1/s 1~1000 Pe/Pi
Pn312 Position Feed-Forward Gain 0 % 0~100 Pe/Pi
Cn033
Speed Feed-Forward Smooth Filter
500 Hz 0~1000 Pe/Pi
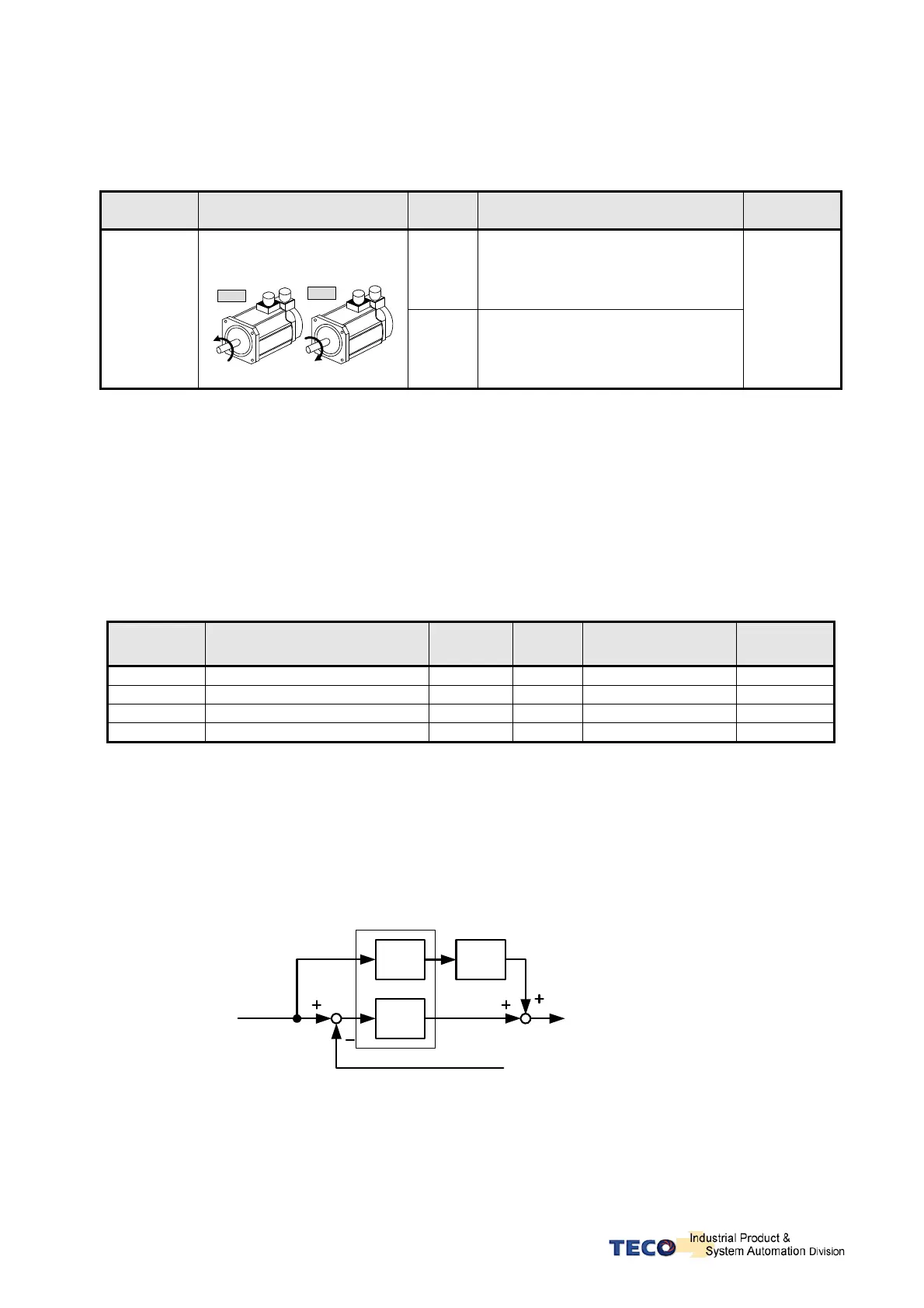
Diagram below shows the position controller. Adjust a higher gain value can reduse
response time.
Position Feed-Forward Gain can also be used to shorten the positioning time.
Refer to section 5-5 for Position Loop Gain Adjustment methods.
Position Controllor
Position Pulse
Command
Encoder Pulse Feed Back
p
K
pff
K
:K
:K
pff
p
Position Loop Gain (1/s)
Filter
Position Loop
Feed-Forward Gain (%)

 Loading...
Loading...
