5-17
5-3-8 Speed Loop Gain
z In speed mode there are two speed controller loops, with separate Gain (P) and integral (I)
functions.
z Speed controllers 1 or 2 can be selected by setting one of the multi- function input
terminals, to selection G-SEL or by setting one of the parameters Cn20-Cn24 as required.
z Please refer to section 5-3-11 section B for more details.
Parameter Name Default Unit Setting range
Control
mode
Sn211 Speed loop gain 1 40 Hz 10~1500 Pe/Pi/S
Sn212 Speed loop integral time constant 1 100
x0.2
ms
1~5000 Pe/Pi/S
Sn213 Speed loop gain 2 40 Hz 10~1500 Pe/Pi/S
Sn214 Speed loop integral time constant 2 100
x0.2
ms
1~5000 Pe/Pi/S
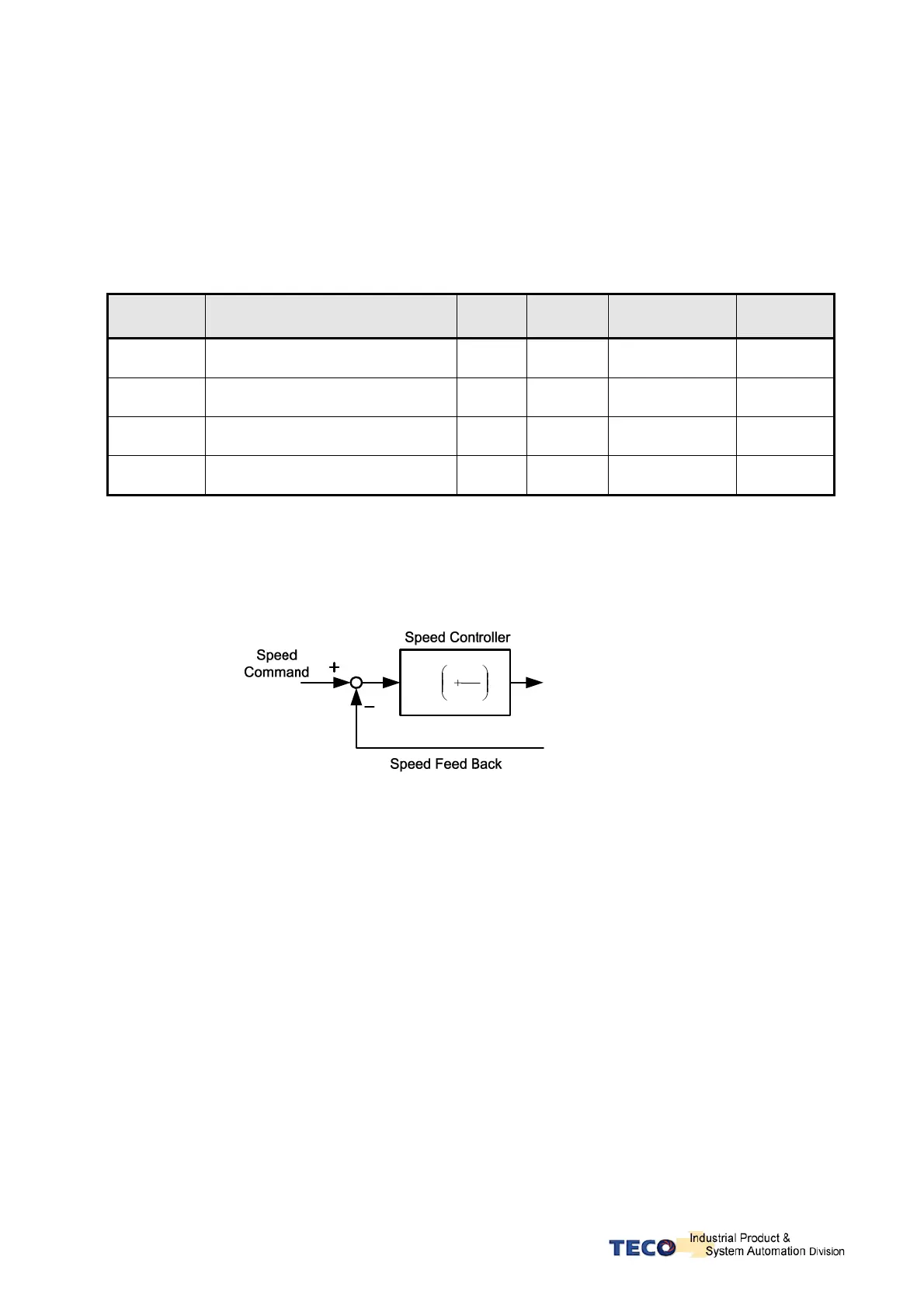
Diagram below shows the speed controller.
Setting a high speed loop gain or a lower speed loop integral time provides a faster speed control response
time.
For more details refer to section 5-5.
Kv: Speed Loop Gain (Hz)
ST
1
1K
i
v
Ti: Speed Loop Integral
Time Constant (sec)

 Loading...
Loading...
