5-66
5-6-4 Brake Mode
z Brake function for servo motor and the external mechanical brake if it is used can be set
according to the table below. Set the brake mode as required for Servo off, Emergency
Stop and CCW/CW rotation inhibit functions.
Parameter Name Setting Description
Control
Mode
Dynamic Brake Mechanical Brake
0 Disable Disable
1 Disable Enable
2
Reserved
Cn008
Brake
Modes
3
Reserved
ALL
Note!
When the CCW/CW Drive Inhibit occur, the Cn009 has the higher priority than Cn008.
Example:
If Cn008 is set to 0 or 1 which means (no Dynamic Brake).
BUT Cn009= 1 (with Dynamic Brake), then the dynamic brake will be effective( enabled).
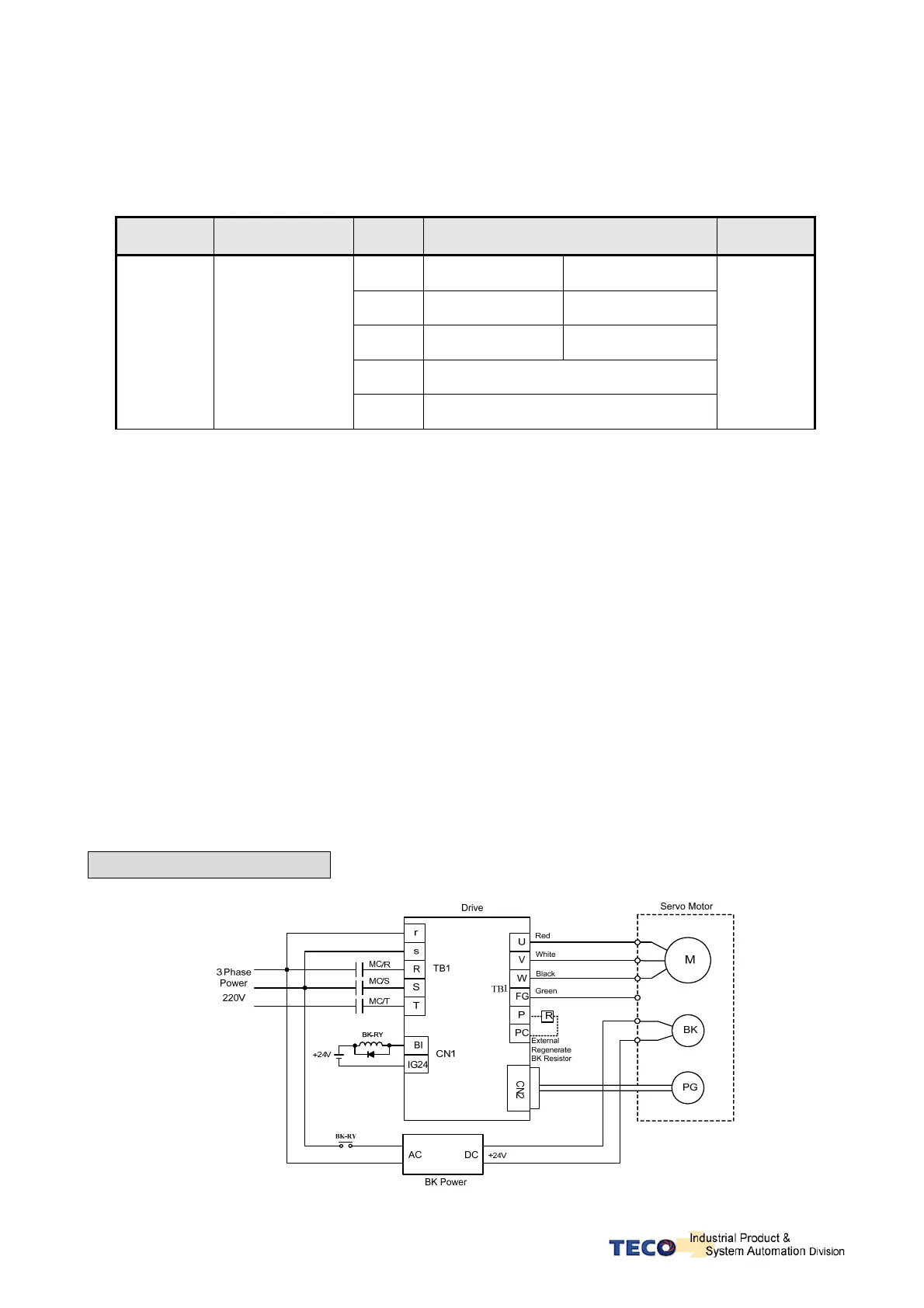
5-6-5 Timing Diagram of Mechanical Brake
z In applications with vertical loading, if the power is turned off, to prevent the load from
falling due to gravity, a servo motor with electro-mechanical brake can be used.
z This servo drive provides a brake output (BI) which can be used for controlling the
external brake.
z Timing of brake output signal can be set by parameter Cn003 (Output Time for
electro-mechanical Brake).
Typical Circuit Diagram

 Loading...
Loading...
