5-53
5-4-9 Other Position Function
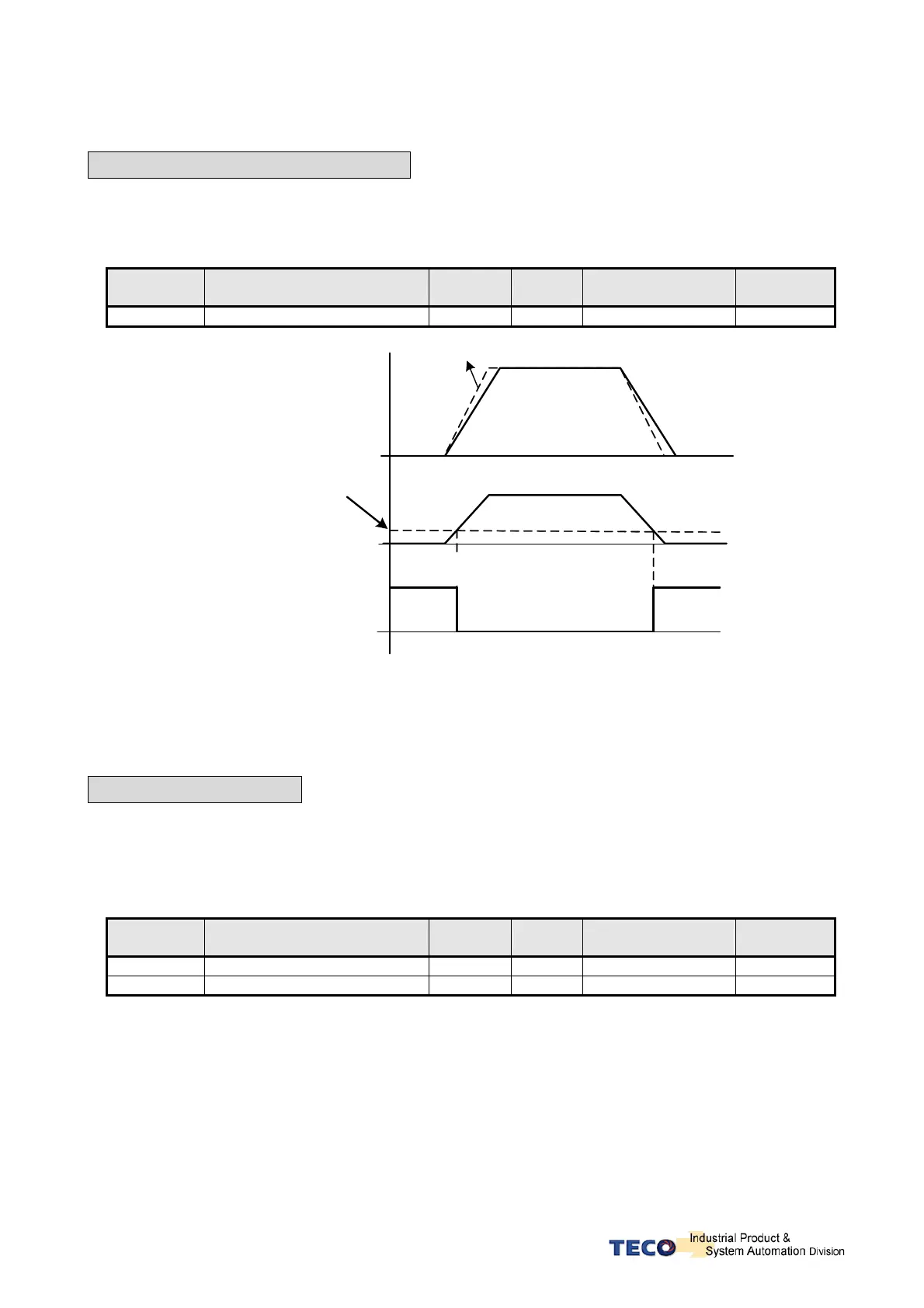
In position (Position Complete)
As long as the position error value (counts) is less than the pulse counts set in
Pn307 (Position Complete value) then INP output contact will be activated.
Parameter Name Default Unit Setting Range
Control
Mode
Pn307 Position Complete value 10 pulse 0~50000 Pi/Pe
Pn307
Position Complete Value
Speed
Position Incorrect Value
pulse
Speed Command
Motor Speed
INP Statue
1
0
Note: Input contacts status “1” (ON) and “0” (OFF)
Please check 5-6-1 to set the required high /Low signal levels (PNP/NPN) selection.
Position error alarm
When the Position error value is greater than the preset pulse value of Pn308
(Positive position error level) or Pn309 (Negative position error level) this will
generate AL-11 (Position error) signal.
Parameter Name Default Unit Setting Range
Control
Mode
Pn308 Positive position error level 50000 pulse 0~50000 Pi/Pe
Pn309 Negative position error level 50000 pulse 0~50000 Pi/Pe

 Loading...
Loading...
