5-56
Position Loop Gain
Position Loop Gain has a direct effect on the response speed of Position Loop.
Under the condition that there is no vibration or noise from servo motor, increasing the
Position Loop Gain Value can enhance the response speed and hence reduce the
positioning time.
Position Loop Feed-Forward Gain
Using Position Loop Feed-Forward Gain can enhance the response speed.
If the Feed-Forward Gain value is setting too high, overshooting could occur and
cause the INP (In Position) output contact to switch ON and OFF repeatedly.
SO monitor Speed Curve and INP (In Position Signal) at the same time then increase
Feed-Forward Value slowly.
If Position Loop Gain is too high, Feed-Forward function will be insignificant.
Quick Parameters for Gain adjustment
Quick Gain adjust parameters are available for setting manually.
The related Gain Adjust parameters are listed in the Quick-Parameter leaflet for
convenient reference.
Quick adjust parameters once altered are saved and become effective immediately,
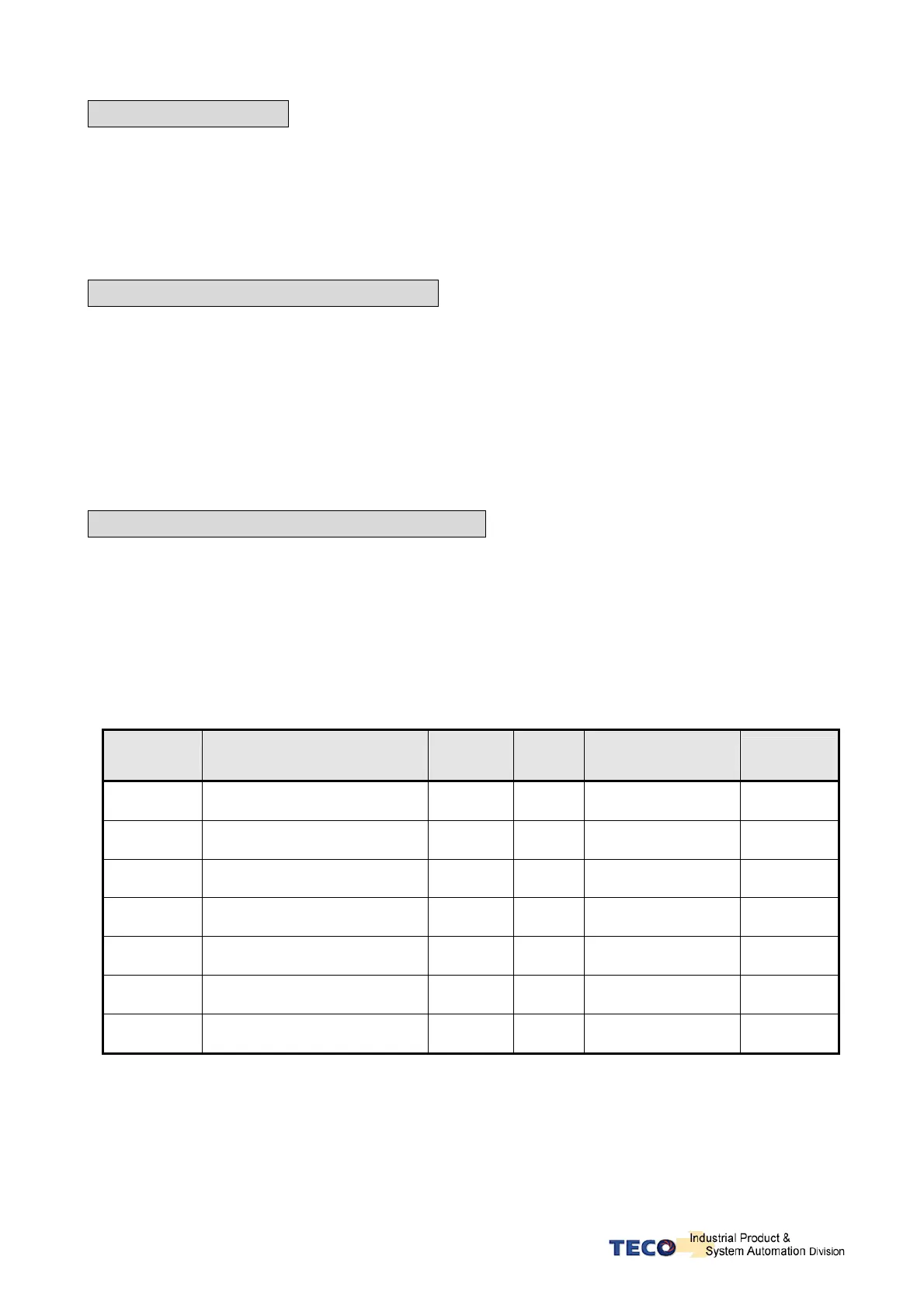
without pressing the Enter-Key. The table below shows the Gain Adjust
Quick-Parameters.
Parameter Name Default Unit Setting Range
Control
Mode
◆
qn501
Speed Loop Gain 1 40 Hz 10~1500 Pe/Pi/S
◆
qn502
Integral Time Constant 1 of
Speed Loop
100
x0.2
msec
1~5000 Pe/Pi/S
◆
qn503
Speed Loop Gain 2 40 Hz 10~1500 Pe/Pi/S
◆
qn504
Integral Time Constant 2 of
Speed Loop
100
x0.2
msec
1~5000 Pe/Pi/S
◆
qn505
Position Loop Gain 1 40 1/s 1~1000 Pe/Pi
◆
qn506
Position Loop Gain 2 40 1/s 1~1000 Pe/Pi
◆
qn507
Position Loop Feed-Forward
Gain
0 % 0~100 Pe/Pi
Become effective immediately without pressing Enter-Key

 Loading...
Loading...
