5-33
Position
Command
POS5 POS4 POS3 POS2 POS1 Position Command Parameter
Position
Speed Parameter
Rotation Number Pn467
P23
1 0 1 1 0
Pulse Number Pn468
Pn469
Rotation Number Pn470
P24
1 0 1 1 1
Pulse Number Pn471
Pn472
Rotation Number Pn473
P25
1 1 0 0 0
Pulse Number Pn474
Pn475
Rotation Number Pn476
P26
1 1 0 0 1
Pulse Number Pn477
Pn478
Rotation Number Pn479
P27
1 1 0 1 0
Pulse Number Pn480
Pn481
Rotation Number Pn482
P28
1 1 0 1 1
Pulse Number Pn483
Pn484
Rotation Number Pn485
P29
1 1 1 0 0
Pulse Number Pn486
Pn487
Rotation Number Pn488
P30
1 1 1 0 1
Pulse Number Pn489
Pn490
Rotation Number Pn491
P31
1 1 1 1 0
Pulse Number Pn492
Pn493
Rotation Number Pn494
P32
1 1 1 1 1
Pulse Number Pn495
Pn496
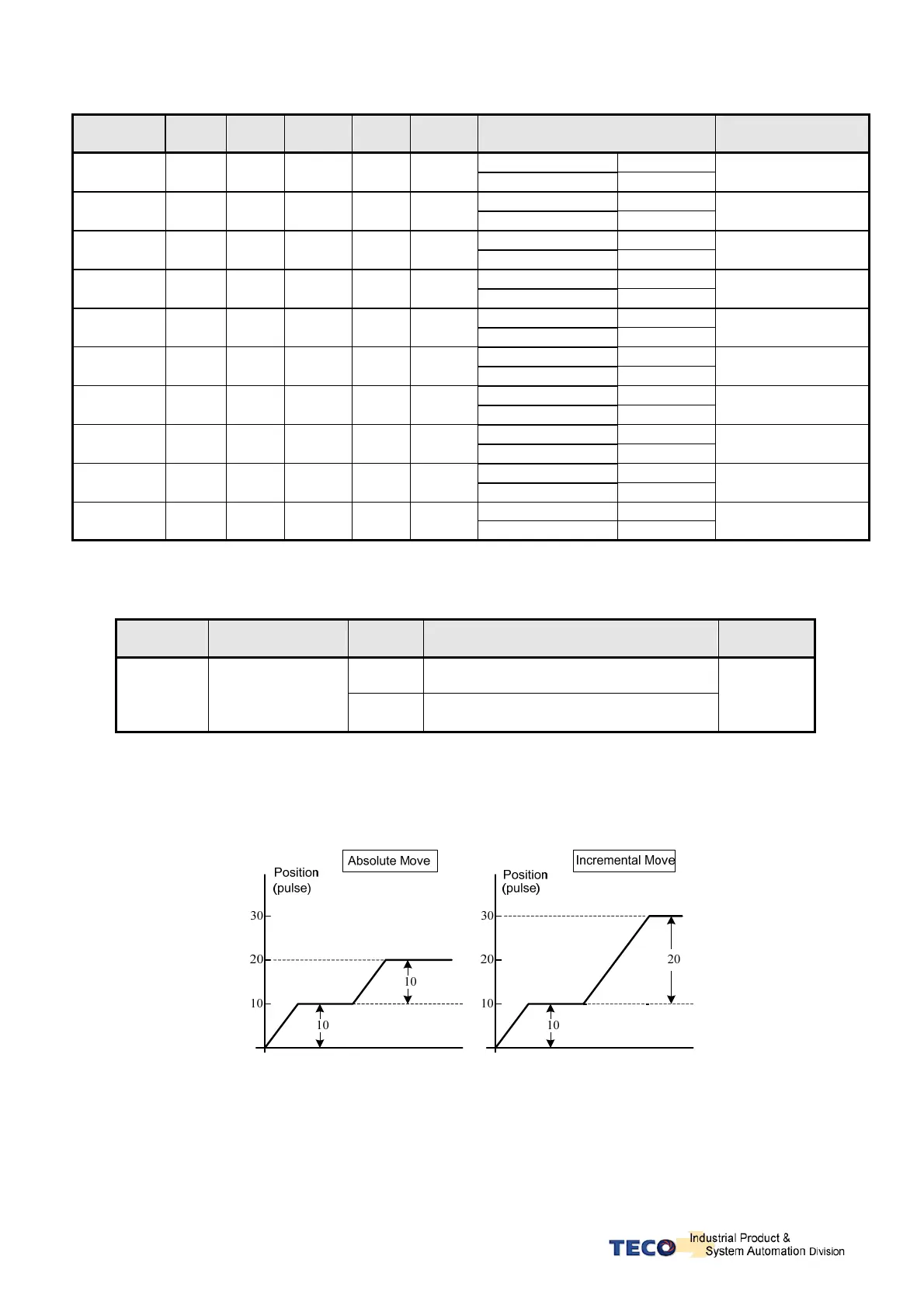
z For internal positioning mode there are two types of moves incremental move or
absolute move, selectable byparameter Pn316 as below.
Parameter
Signal
Name Setting Description
Control
Mode
0 Absolute mode
★
Pn316
Internal position
command mode
selection
1 Incremental mode
Pi
New setting will become effective after re-cycling the power.
Example below shows the difference between absolute and incremental moves.
For two pulse commands of 10 pulse position pulse command and followed with another 20 pulse,
the traveled positions will be different.

 Loading...
Loading...
