Aligna
®
4D User Manual
66 / 84
the mirror mounts with your finger tips the position and angle dot will go out of the display
range immediately.)
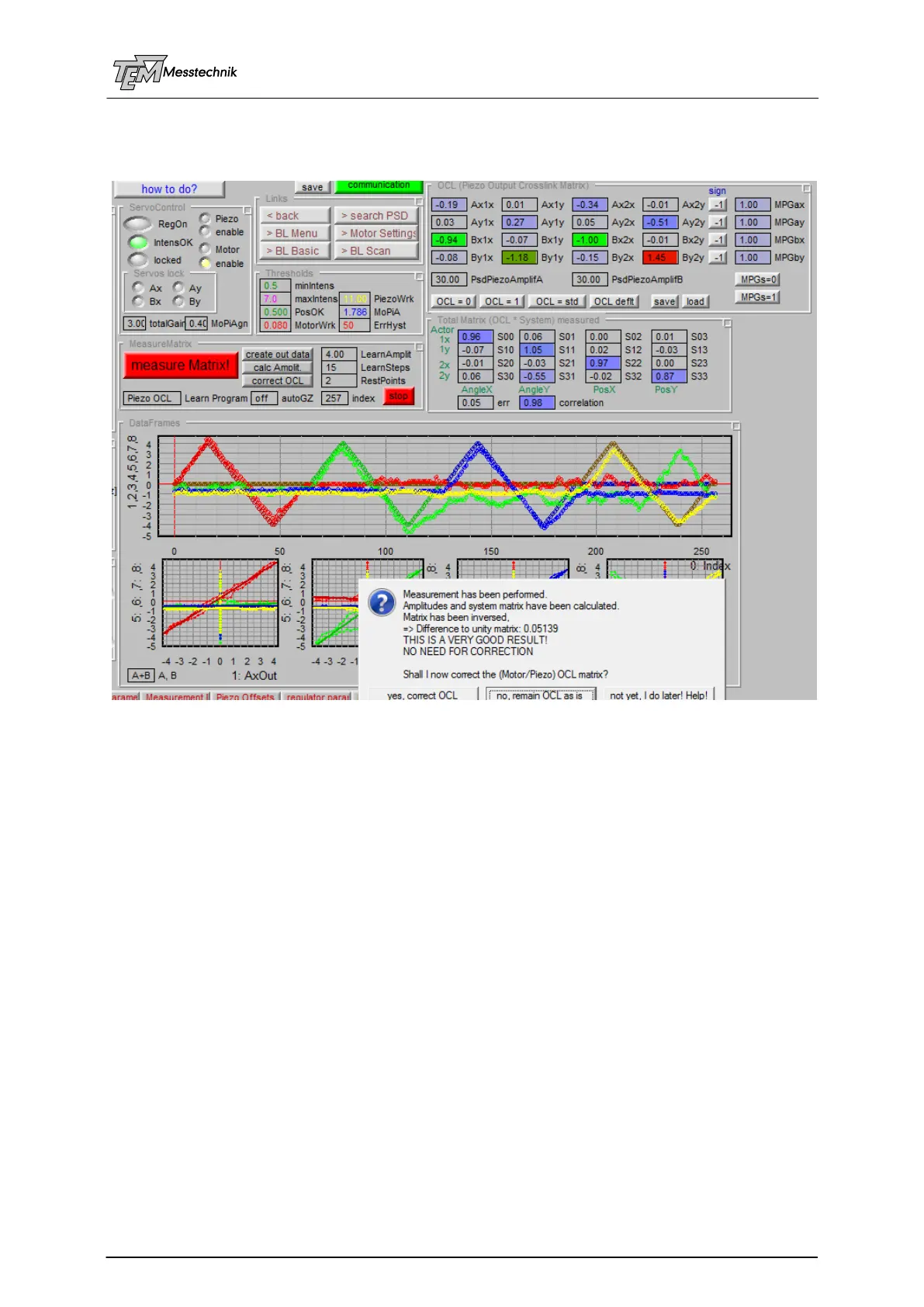
After one or two learning cycles, you will get a result as shown below:
Compared to the motorized learning the signals (of the feed-forward measurement) are noisier
and have larger offsets. The reasons are the blown-up scale, but particularly the piezo hyste-
resis. Especially the position movement (blue and yellow) looks much worse.
NOTE: For position movement the angle movements have to counterbalance each other ex-
actly. If the hysteresis of the actuators of mirror mount 1 and 2 are not exactly the same (they
never are), there will be residual angle movements. (You can see the green (angle Y) move-
ments in the last quarter, in which only position Y movement is expected, but no angle Y
movement.)
Nevertheless, the orthogonalization works well, the 4 degrees of freedom are independent
enough from each other, and the 4D piezo servo loops should have an easy job.
If one of the OCL elements exceeds +/- 1.49 (which is the hardware limitation of the "electronic
potentiometers, the MDACs) you should increase "PsdPiezoAmplifA" and/or "...AmplifB".
(Normally you can change both values synchronously. For individual alignment: If the red
limitation numbers are in line Ay or Ay lines, 1st or 2nd, AmplifA should be increased, if the red
numbers are in Bx or By lines, 3rd or 4th, AmplifB should be increased).
If, on the other hand, none of the elements is larger than +/- 1 you should decrease the
"AmplifA/B" values. (If maximum value in one line pair is 0.5, e.g., you should decrease the
AmplifA/B by factor of 2. Then in the next iterative cycle the max value should be around 1).
If the learning was more or less OK, you can use the actual OCL for learning of next optimiza-
tion cycle. If, however, one or more of the OCL coefficients are at their limits (+/-1.49), the
movements (given to the actuators) can be partially "wrong". They can even have opposite
signs, or the measured matrix becomes no longer "linearly independent". Therefore, it is better