GR-5 Configuration
GR-5 Operator’s Manual
3-38
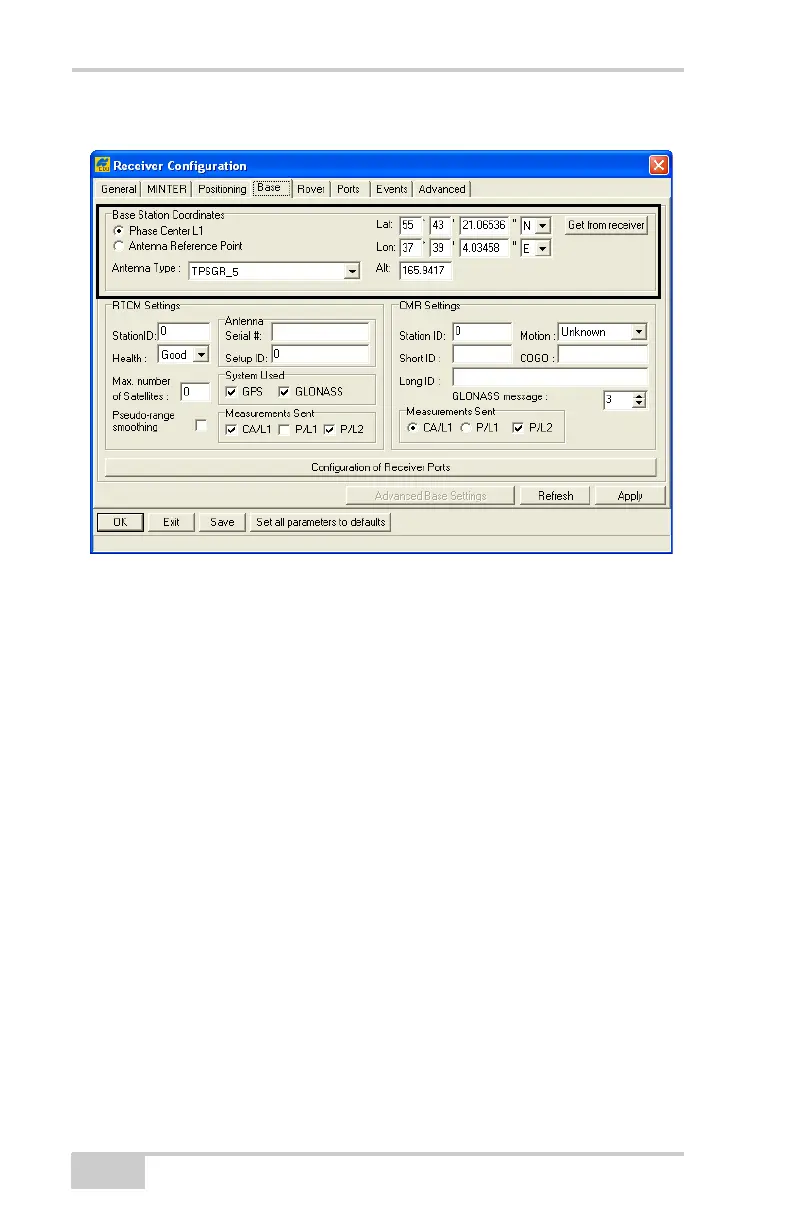
Figure 3-35. Base Configuration
10. For the Rover receiver, click the Rover tab and set the following
parameters, then click Apply (Figure 3-35 on page 3-38).
• Positioning Mode – For post-processed surveys, select
Standalone; for RTK surveys, select RTK float or RTK fixed.
• RTK Parameters, RTK mode – select either Extrapolation for
RTK float (kinematic) or Delay for RTK fixed (static).
– Extrapolation is for low-latency, high frequency output
(>= 5 Hz) RTK applications. The Rover will extrapolate
the Base station’s carrier phase measurement corrections
when computing the Rover's current RTK position.
This setting (extrapolation) is recommended.
– Delay is for 1 Hz high precision RTK applications. The
Rover RTK engine computes either a delayed RTK
position (for the epoch to which the newly received
RTCM/CMR message corresponds) or the current stand-
alone position (while waiting for new RTCM/CMR
messages coming from the base).