14.26 Command: Force
Note: if no obstacles are met in an axis where a non-zero force is set, the robot arm attempts to
accelerate along that axis.
Although an axis is selected to be compliant, the robot program still tries to move the robot along
that axis. However, force control assures that the robot arm still approaches the specified force.
WARNING:
1. Avoid high deceleration just before entering force mode.
2. Avoid high acceleration in force mode, since it decreases force
control accuracy.
3. Avoid movements parallel to compliant axes before entering
force mode.
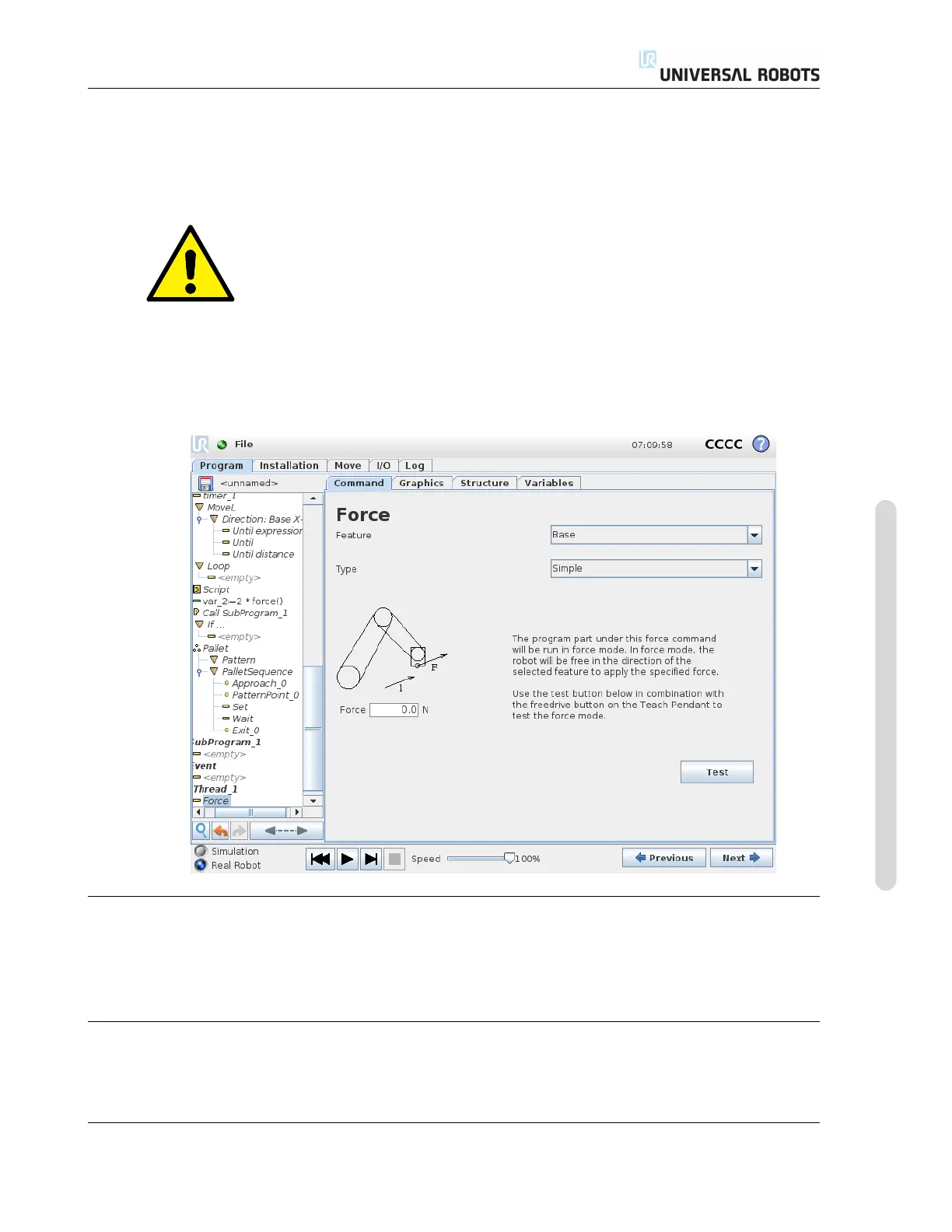
Feature selection
The Feature menu is used to select the coordinate system (axes) the robot will use while it is oper-
ating in force mode. The features in the menu are those which have been defined in the installation
(see 13.12).
Force mode type
The are four different types of force mode each determining the way in which the selected feature
will be interpreted.
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
II-105 CB3