13 Robot Control
13.1 Move Tab
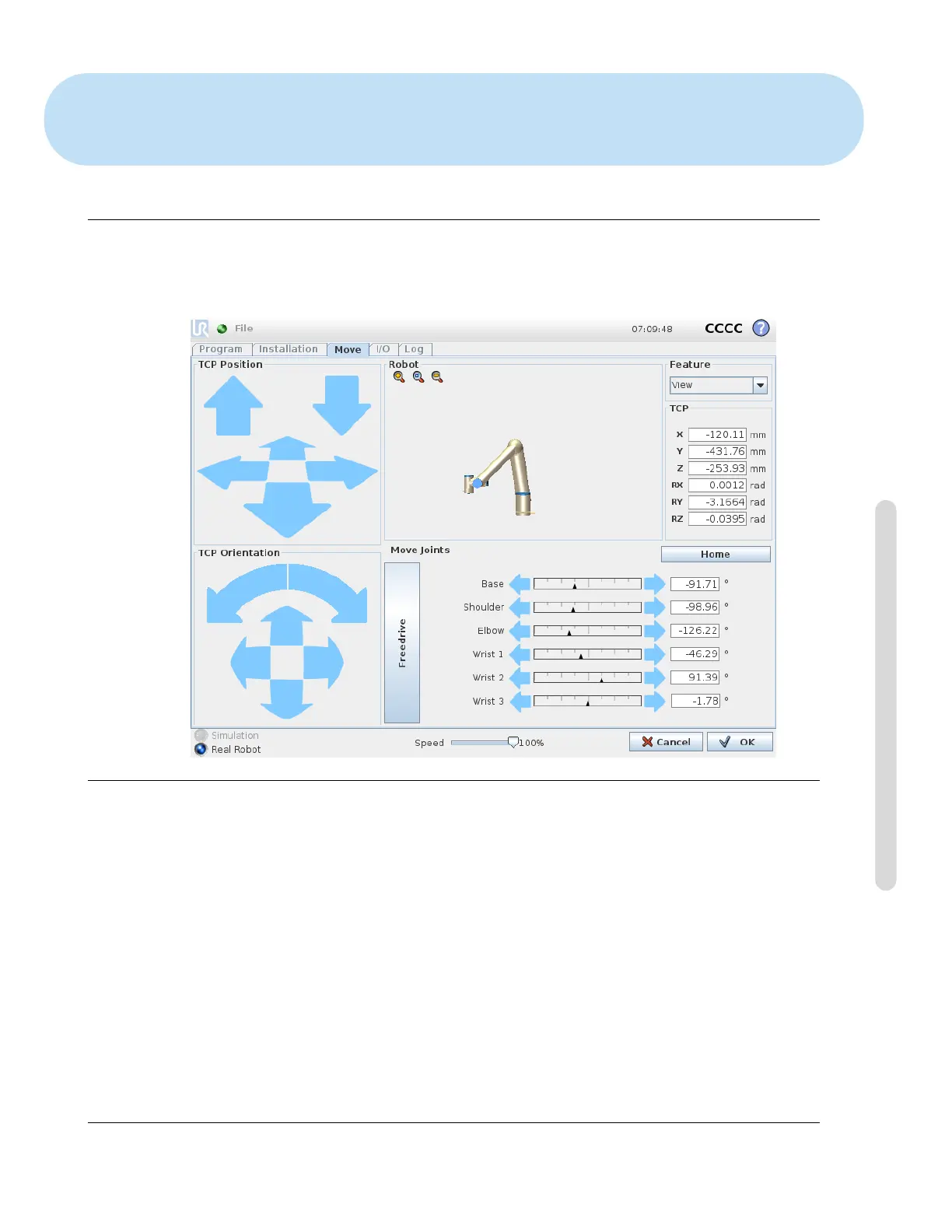
On this screen you can always move (jog) the robot arm directly, either by translating/rotating the
robot tool, or by moving robot joints individually.
13.1.1 Robot
The current position of the robot arm is shown in 3D graphics. Push the magnifying glass icons to
zoom in/out or drag a finger across to change the view. To get the best feel for controlling the robot
arm, select the View feature and rotate the viewing angle of the 3D drawing to match your view of
the real robot arm.
If the current position of the robot TCP comes close to a safety or trigger plane, or the orienta-
tion of robot tool is near the tool orientation boundary limit (see 10.12), a 3D representation
of the proximate boundary limit is shown. Note that when the robot is running a program, the
visualization of boundary limits will be disabled.
Safety planes are visualized in yellow and black with a small arrow representing the plane normal,
which indicates the side of the plane on which the robot TCP is allowed to be positioned. Trigger
planes are displayed in blue and green and a small arrow pointing to the side of the plane, where
the Normal mode limits (see 10.6) are active. The tool orientation boundary limit is visualized
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
II-37 CB3