6.5 Origin Settings
6.5.1 When Using an Absolute Encoder
6-12
6.5
Origin Settings
It is necessary to define a reference position to operate a device or machine. This is done with
origin settings.
The origin settings depend on whether an absolute encoder or an incremental encoder is used.
6.5.1
When Using an Absolute Encoder
If you use an absolute encoder, it is not necessary to set the origin every time the power supply
to the equipment is turned ON.
However, when you set up the equipment, you must set Pn63C to the offset between the origin
of the absolute encoder and the position of the origin of the reference coordinate system
(called the machine coordinate system).
When you start a system that uses an absolute encoder, you must initialize the absolute
encoder and adjust the position of the machine origin. Then you must set the offset that defines
the origin of the reference coordinates.
Perform one of the following operations to set the offset.
• Execute utility function Fn066.
• Calculate the value and set it in Pn63C.
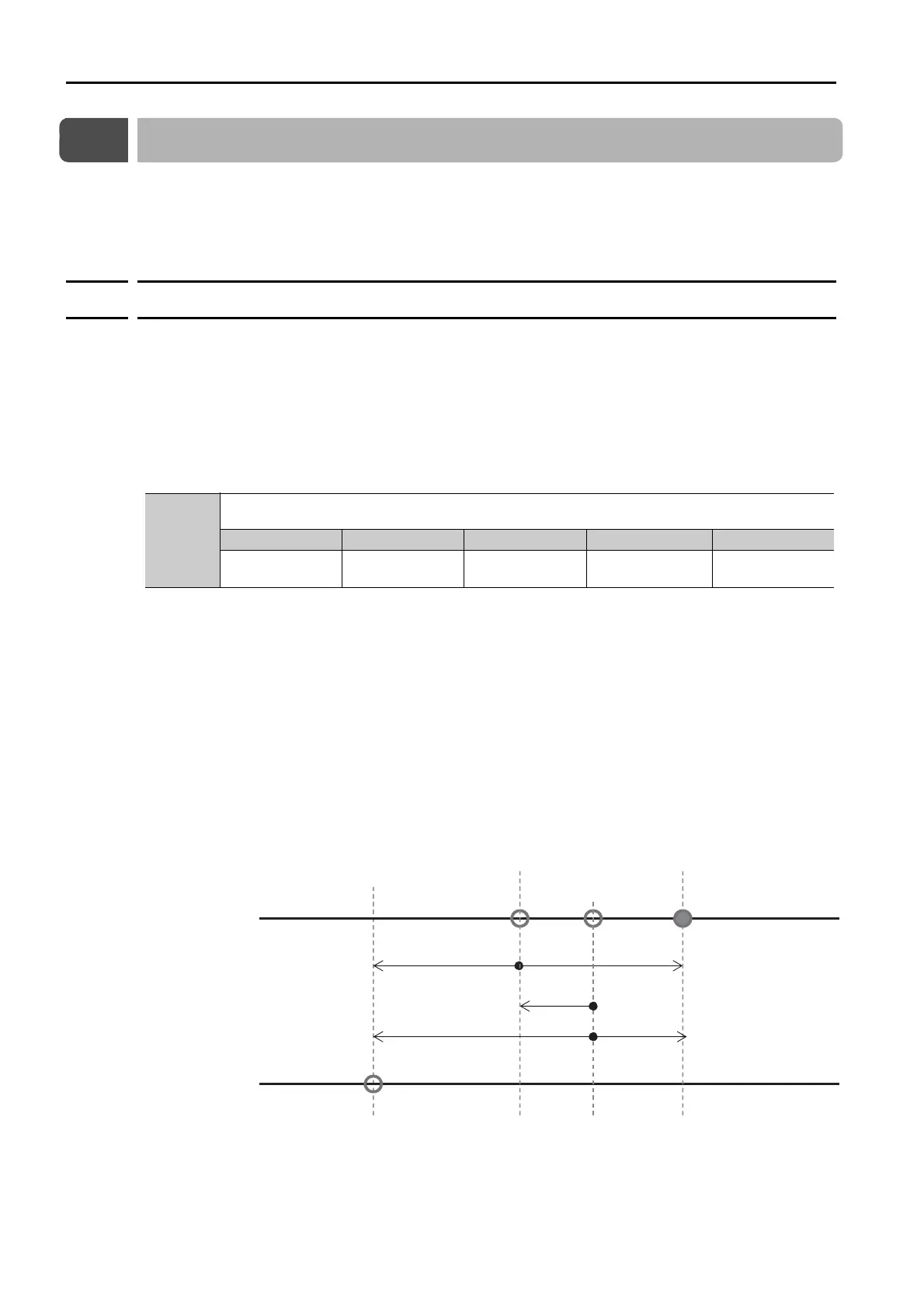
The relationship between the origin of the absolute encoder and the machine origin coordinate
system is shown in the following figure. Use the following formula to find a new absolute
encoder offset (Pn63C).
Pn63C = Current Pn63C + N - P
N: Current position of machine in new reference coordinate system
If this position is to be defined as the origin, then normally N is 0.
P: Current position of machine in current reference coordinate system
When using the linear type coordinate (Pn637 =
n.
0), set the calculated value in Pn63C.
Pn63C
Origin (Incremental Encoder)
Absolute Encoder Offset (Absolute Encoder)
Setting Range Setting Unit Default Setting When Enabled Classification
-1073741823 to
+1073741823
Reference unit 0 After restart Setup
Encoder coordinate
Absolute encoder origin
Current origin in reference
coordinate system
(Origin of reference coordinate
system = Machine origin)
New origin of reference
coordinate system
= New machine coordinate
Current Pn63C = −X
Current position of machine
Current position of machine in
current reference coordinate system (P)
Current position of machine in
new reference coordinate system (N)
New Pn63C
- ( P - N )
XX
Coordinate of current machine origin
in encoder coordinate system
Reference (machine)
coordinate

 Loading...
Loading...






